
La navigation des robots améliore 30% en imitant la façon dont les humains se répandent et oublient les informations
Une équipe de recherche a développé une nouvelle technologie «IA physique» qui améliore l'efficacité de la navigation autonome multi-robot en modélisant la propagation et l'oubli des problèmes sociaux. Cette réalisation devrait devenir une technologie clé pour stimuler la productivité des robots mobiles autonomes dans les centres logistiques, des entrepôts à grande échelle et des usines intelligentes.
L'œuvre est publiée dans le Journal of Industrial Information Intégration. L'étude a été dirigée par le professeur Kyung-joon Park du Département de génie électrique et d'informatique et le Centre physique de l'IA de DGIST.
Les robots mobiles autonomes (AMR) jouent un rôle central dans l'automatisation dans les sites de logistique et de fabrication. Cependant, dans les opérations du monde réel, des obstacles inattendus, tels que des chariots élévateurs, des ascenseurs de travail ou des cargaisons inattendues, perturbent souvent un mouvement fluide. Jusqu'à présent, les robots n'ont réagi qu'aux situations immédiates et ajusté leurs itinéraires en conséquence, conduisant à des détours et à des retards inutiles, et finalement, une diminution de la productivité.
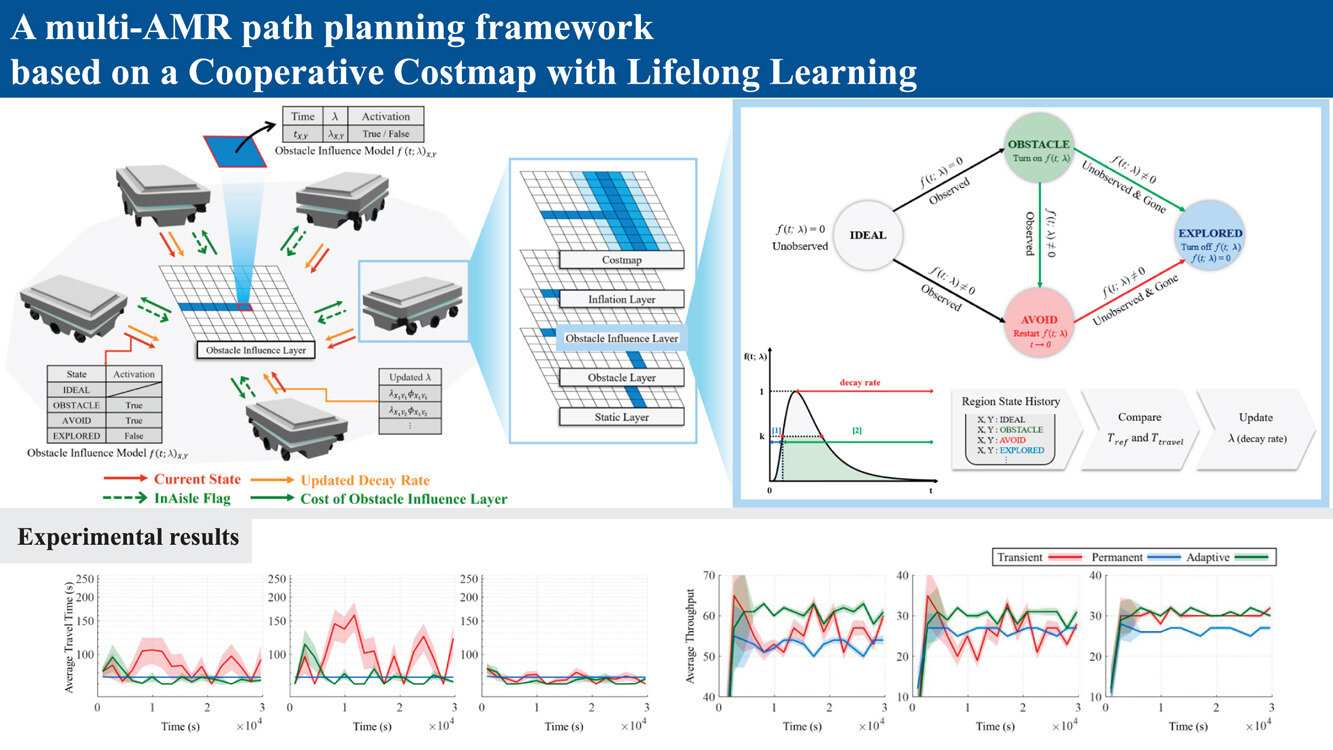
Pour relever ce défi, l'équipe du professeur Kyung-Joon Park a appliqué un phénomène unique de la société humaine aux robots. Ils se sont concentrés sur la façon dont certains événements ou problèmes se propagent rapidement et sont ensuite progressivement oubliés. L'équipe a modelé mathématiquement ce processus et l'a incorporé dans un algorithme de renseignement collectif pour les robots. Par conséquent, les robots ont pu oublier naturellement des informations inutiles, ne partager immédiatement que les détails importants et obtenir une navigation coopérative plus efficace.
Dans les expériences réelles, l'équipe a utilisé le « simulateur de gazebo », qui reproduit un environnement de centre logistique. Les résultats ont montré que la nouvelle technologie augmentait le débit de tâche jusqu'à 18,0% et réduit le temps de conduite moyen jusqu'à 30,1% par rapport à la navigation conventionnelle ROS 2. Cela démontre que les robots ne sont plus simplement des machines qui évitent les obstacles; Ils évoluent vers des systèmes d'IA physiques qui peuvent comprendre les principes sociaux et fonctionner de manière autonome.
Une autre caractéristique précieuse de cette technologie est sa facilité d'application. Il peut être implémenté en utilisant uniquement le LiDAR 2D sans capteurs supplémentaires et a été développé comme un plugin compatible avec la pile de navigation ROS 2. Cela implique qu'il peut être appliqué directement aux systèmes de navigation autonomes existants sans avoir besoin d'équipements complexes, permettant un déploiement rapide dans des milieux industriels tels que des essaims de drones, des véhicules autonomes et des robots logistiques. En particulier, il devrait jouer un rôle important dans la mise en œuvre des systèmes de navigation autonomes coopératifs pour la gestion du trafic de la ville intelligente ainsi que des opérations d'exploration et de sauvetage à grande échelle.
Le professeur Kyung-joon Park a déclaré: « Nous avons imité le principe social de l'oubli d'informations inutiles tout en conservant uniquement des informations importantes pour permettre un mouvement efficace. Cette étude est significative en ce qu'elle montre comment l'IA physique évolue pour ressembler à un comportement humain. »