
Le robot de ping-pong renvoie des photos avec une précision à grande vitesse
Les ingénieurs du MIT se présentent sur le jeu robotique Ping Pong avec un design puissant et léger qui renvoie des tirs avec une précision à grande vitesse.
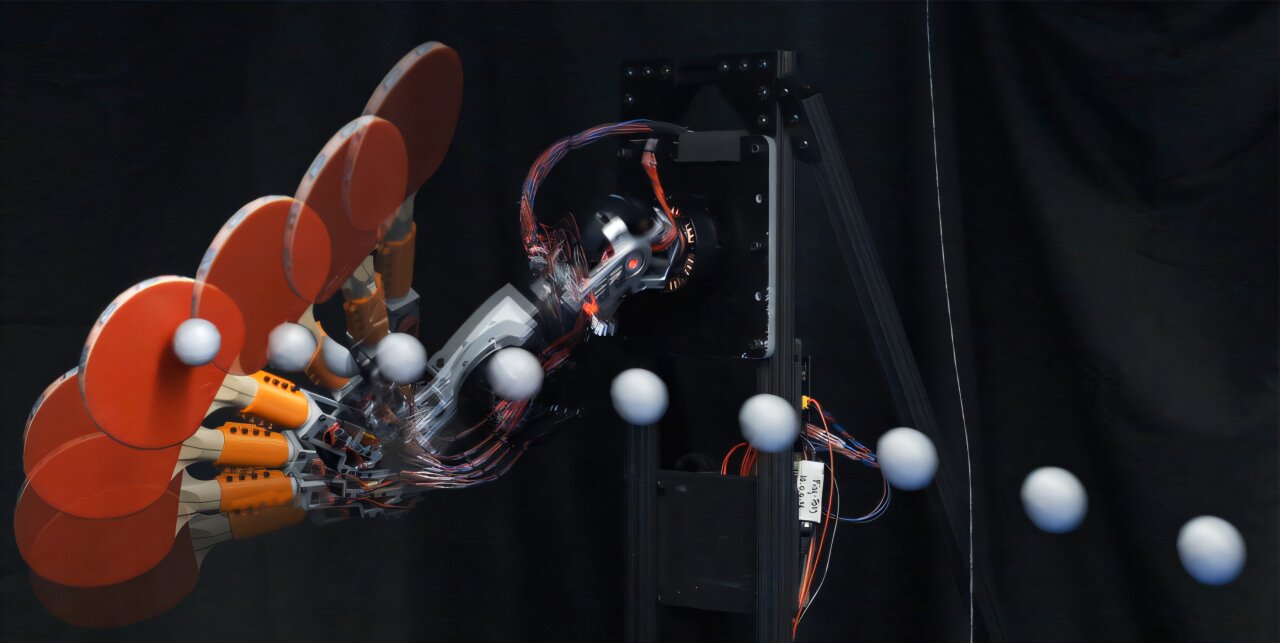
Le nouveau bot de tennis de table comprend un bras robotique à plusieurs rouères qui est fixé à une extrémité d’une table de ping-pong et branche une pagaie de ping-pong standard. Aidé par plusieurs caméras à grande vitesse et un système de contrôle prédictif à large bande passante, le robot estime rapidement la vitesse et la trajectoire d’une balle entrante et exécute l’un des nombreux types de swing – boucle, conduite ou hop – pour frapper précisément la balle à un emplacement souhaité sur la table avec divers types de spin.
Dans les tests, les ingénieurs ont lancé 150 balles sur le robot, l’une après l’autre, de l’autre côté de la table de ping-pong. Le bot a réussi à retourner les balles avec un taux de succès d’environ 88% entre les trois types de swing. La vitesse de frappe du robot s’approche des vitesses de retour les plus élevées des joueurs humains et est plus rapide que celle des autres conceptions de tennis de table robotique.
Maintenant, l’équipe cherche à augmenter le rayon de jeu du robot afin qu’il puisse retourner une plus grande variété de tirs. Ensuite, ils envisagent que la configuration pourrait être un concurrent viable dans le domaine croissant des systèmes de formation robotique intelligents.
Au-delà du jeu, l’équipe affirme que la technologie de tennis de table pourrait être adaptée pour améliorer la vitesse et la réactivité des robots humanoïdes, en particulier pour les scénarios de recherche et de sauvetage, et des situations dans lesquelles un robot devrait réagir ou anticiper rapidement.
« Les problèmes que nous résolvons, spécifiquement liés à l’interception des objets très rapidement et précisément, pourraient potentiellement être utiles dans les scénarios où un robot doit effectuer des manœuvres dynamiques et planifier où son effecteur final rencontrera un objet, en temps réel », explique David Nguyen, étudiant diplômé du MIT.
Nguyen est co-auteur de la nouvelle étude, ainsi que l’étudiant diplômé du MIT, Kendrick Cancio et Sangbae Kim, professeur agrégé d’ingénierie mécanique et chef du MIT BioMetics Robotics Lab. Les chercheurs présenteront les résultats de ces expériences dans un article de la Conférence internationale de l’IEEE sur la robotique et l’automatisation (ICRA) ce mois-ci.
Les résultats sont publiés sur le arxiv serveur de préimprimée.
Jeu précis
Construire des robots pour jouer au ping-pong est un défi que les chercheurs ont relevé depuis les années 1980. Le problème nécessite une combinaison unique de technologies, y compris une vision industrielle à grande vitesse, des moteurs et actionneurs rapides et agiles, un contrôle précis des manipulateurs et une prédiction précise en temps réel, ainsi qu’une planification de la stratégie de jeu.
« Si vous pensez au spectre des problèmes de contrôle en robotique, nous avons – à une fin – une gestion, qui est généralement lente et très précise, comme ramasser un objet et vous assurer que vous le saisissez bien. À l’autre extrémité, vous avez la locomotion, qui consiste à être dynamique et à adapter les perturbations dans votre système », explique Nguyen. « Le ping-pong se trouve entre ceux-ci. Vous faites toujours une manipulation, en ce que vous devez être précis pour frapper le ballon, mais vous devez le frapper dans les 300 millisecondes. Donc, il équilibre des problèmes similaires de locomotion dynamique et de manipulation précise. »
Les robots de ping-pong ont parcouru un long chemin depuis les années 1980, plus récemment avec des conceptions d’Omron et de Google DeepMind qui utilisent des techniques d’intelligence artificielle pour « apprendre » des données précédentes de ping-pong, pour améliorer les performances d’un robot contre une variété croissante de coups et de coups. Ces conceptions se sont révélées plus rapides et précises pour se rallier avec des joueurs humains intermédiaires.
« Ce sont des robots vraiment spécialisés conçus pour jouer au ping-pong », explique Cancio. « Avec notre robot, nous explorons comment les techniques utilisées pour jouer au ping-pong pourraient se traduire par un système plus généralisé, comme un robot humanoïde ou anthropomorphe qui peut faire de nombreuses choses utiles différentes. »

Contrôle du jeu
Pour leur nouveau design, les chercheurs ont modifié un bras robotique léger et haute puissance que Kim’s Lab a développé dans le cadre de l’humanoïde du MIT – un robot bipède à deux bras qui a la taille d’un petit enfant. Le groupe utilise le robot pour tester diverses manœuvres dynamiques, notamment la navigation de terrain inégal et variable ainsi que le saut, l’exécution et la réalisation de flips, dans le but d’un jour de déploiement de ces robots pour les opérations de recherche et de résistance.
Chacun des bras de l’humanoïde a quatre articulations, ou degrés de liberté, qui sont chacun contrôlés par un moteur électrique. Cancio, Nguyen et Kim ont construit un bras robotique similaire, qu’ils ont adapté au ping-pong en ajoutant un degré de liberté supplémentaire au poignet pour permettre le contrôle d’une pagaie.
L’équipe a fixé le bras robotique à une table à une extrémité d’une table de ping-pong standard et a installé des caméras de capture de mouvement à grande vitesse autour de la table pour suivre les balles qui sont rebondies au robot. Ils ont également développé des algorithmes de contrôle optimaux qui prédisent, en fonction des principes de mathématiques et de physique, quelle orientation de vitesse et de pagaie le bras doit exécuter pour frapper une balle entrante avec un type particulier de swing: boucle (ou topspin), entraîner (droit) ou hop (backspin).
Ils ont implémenté les algorithmes à l’aide de trois ordinateurs qui ont simultanément traité les images de la caméra, estimé l’état en temps réel d’une balle et traduit ces estimations en commandes pour que les moteurs du robot réagissent rapidement et prennent un swing.
Après avoir rebondi consécutivement 150 balles au bras, ils ont constaté que le taux de succès du robot, ou la précision du retour du ballon, était à peu près la même pour les trois types de balançoires: 88,4% pour les frappes en boucle, 89,2% pour les côtelettes et 87,5% pour les disques. Ils ont depuis réglé le temps de réaction du robot et ont trouvé que le bras frappait les balles plus rapidement que les systèmes existants, à des vitesses de 20 mètres par seconde.
Dans leur article, l’équipe rapporte que la vitesse de frappe du robot, ou la vitesse à laquelle la pagaie atteint le ballon, est en moyenne de 11 mètres par seconde. Les joueurs humains avancés sont connus pour retourner des balles à des vitesses comprises entre 21 et 25 mètres par seconde. Depuis la rédaction des résultats de leurs expériences initiales, les chercheurs ont encore modifié le système et ont enregistré des vitesses de frappe allant jusqu’à 19 mètres par seconde (environ 42 miles par heure).
« Une partie de l’objectif de ce projet est de dire que nous pouvons atteindre le même niveau d’athlétisme que les gens », explique Nguyen. « Et en termes de vitesse de frappe, nous devenons vraiment, très proches. »
Leur travail de suivi a également permis au robot de viser. L’équipe a incorporé des algorithmes de contrôle dans le système qui prédisent non seulement comment mais où frapper une balle entrante. Avec sa dernière itération, les chercheurs peuvent définir un emplacement cible sur la table et le robot frappera une balle au même endroit.
Parce qu’il est fixé à la table, le robot a une mobilité et une portée limités, et peut surtout retourner des balles qui arrivent dans une zone en forme de croissant autour de la ligne médiane de la table. À l’avenir, les ingénieurs prévoient de truquer le bot sur une plate-forme de portique ou de roues, lui permettant de couvrir davantage de la table et de retourner une plus grande variété de tirs.
« Une grande chose à propos du tennis de table est de prédire le rotation et la trajectoire du ballon, étant donné la façon dont votre adversaire le frappe, qui est des informations qu’un lanceur de balle automatique ne vous donnera pas », explique Canco. « Un robot comme celui-ci pourrait imiter les manœuvres qu’un adversaire ferait dans un environnement de jeu, d’une manière qui aide les humains à jouer et à s’améliorer. »