
Le nouveau système contrôle de manière fiable les mouvements prothétiques sans s'appuyer sur des signaux biologiques
La perte d'un membre après une blessure, un accident ou une maladie peut considérablement réduire la qualité de vie, ce qui rend plus difficile pour les gens de s'engager dans des activités quotidiennes. Pourtant, les avancées technologiques récentes ont ouvert de nouvelles possibilités passionnantes pour le développement de membres prothétiques plus confortables, plus intelligents et intuitifs, ce qui pourrait permettre aux utilisateurs de terminer facilement une gamme de tâches plus large.
De nombreuses prothèses intelligentes développées au cours de la dernière décennie sont exploitées via des signaux myoélectriques, des signaux électriques provenant de muscles qui sont ramassés par des capteurs attachés à la peau d'un porteur. Bien que certains de ces systèmes se soient révélés très efficaces, ils obligent les utilisateurs à produire consciemment des signaux musculaires spécifiques pour effectuer des mouvements souhaités, qui peuvent être à la fois physiquement et mentalement exigeant.
Des chercheurs de l'Université Memorial de Terre-Neuve au Canada ont récemment développé une nouvelle méthode automatisée pour contrôler les mouvements des mains prothétiques qui ne reposent pas sur des signaux myoélectriques ou d'autres signaux biologiques. Leur système de contrôle proposé, décrit dans un article publié sur le serveur de préparation arxivest basé sur un modèle basé sur l'apprentissage automatique formé sur des séquences vidéo de mains prothétiques terminant des tâches spécifiques, qui peuvent planifier et exécuter de manière autonome les mouvements nécessaires pour s'attaquer à une tâche donnée.
« L'idée de ce document est venue de notre désir de rendre les mains prothétiques plus faciles à utiliser », a déclaré Xianta Jiang, auteur principal du journal, à Tech Xplore. « Les systèmes traditionnels s'appuient sur des signaux musculaires, qui peuvent être difficiles à contrôler et à fatiguer pour les utilisateurs. Nous voulions explorer si un système autonome – comme un robot qui peut« voir »et« ressentir »le monde – pourrait prendre le contrôle de cet effort. »
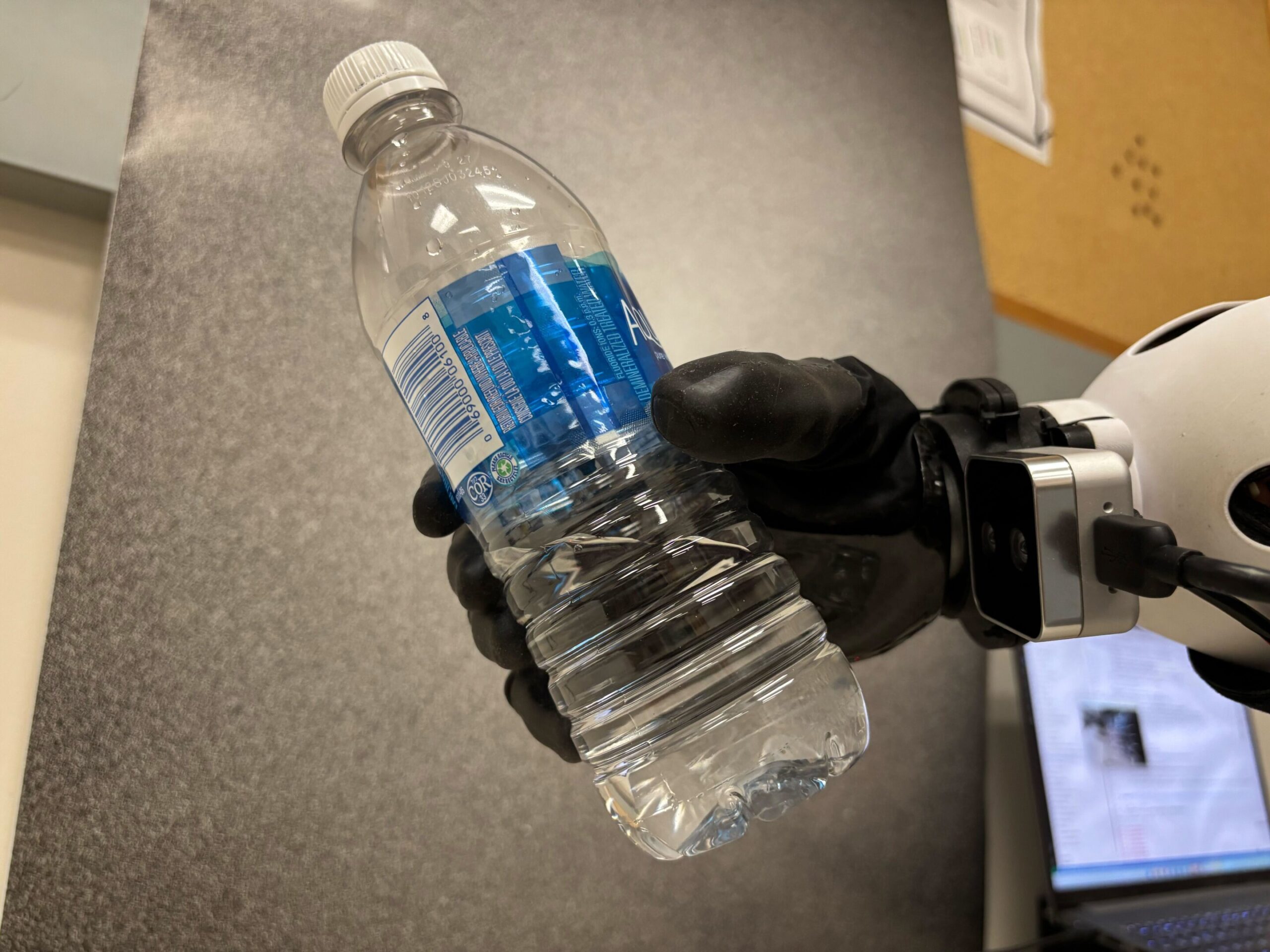
L'objectif principal de la récente étude de Jiang et de ses collègues était de créer une main prothétique qui pourrait traiter de manière autonome son environnement et effectuer des tâches de saisie, nécessitant des efforts minimaux de la part de l'utilisateur. Au lieu de planifier des mouvements basés sur des signaux biologiques ou sur les commandes envoyées par un utilisateur, le système de contrôle créé par les chercheurs s'appuie sur des données collectées par une petite caméra montée sur un poignet prothétique, ainsi que des capteurs détectant à la fois le toucher et le mouvement.
« Ces entrées sont combinées à l'aide de l'intelligence artificielle (AI), en particulier une technique d'apprentissage appelée Imitation Learning », a expliqué Kaijie Shi, premier auteur de l'article. « Le modèle d'IA apprend des démonstrations passées – en regardant en ce qui concerne la façon dont les objets doivent être ramassés, tenus et libérés. La main utilise ensuite ces connaissances pour prendre des décisions en temps réel. Ce qui est unique, c'est que le système ne s'appuie pas sur les signaux musculaires; il fonctionne en` `compréhension '' de l'objet et de la tâche, ce qui le rend plus naturel et intuitif pour l'utilisateur. »
Pour tester leur système de contrôle nouvellement développé, les chercheurs l'ont déployé sur une véritable main prothétique et ont effectué une série d'expériences dans un cadre réel. Ils ont constaté que même lorsqu'ils étaient formés sur seulement quelques vidéos montrant la même personne gérant un ensemble limité d'objets, leur système a permis à la main prothétique de saisir avec succès les éléments souhaités, avec un taux de réussite élevé.
« Notre système a effectué des tâches de saisie et de libération de manière autonome avec plus de 95% », a déclaré Jiang. « Il s'agit d'une étape majeure vers la fabrication de mains prothétiques qui fonctionnent automatiquement et de manière fiable dans des milieux quotidiens. Pratiquement, cela signifie que les futurs utilisateurs prothétiques pourraient bénéficier d'un appareil qui les aide à effectuer des tâches courantes, comme ramasser une tasse ou ouvrir une porte, sans avoir besoin de penser constamment à chaque mouvement. »
Les chercheurs prévoient de continuer à améliorer l'approche basée sur l'apprentissage par l'imitation qu'ils ont développée et à les tester dans un plus large éventail d'expériences, impliquant également des personnes qui bénéficieraient de systèmes prothétiques plus avancés. À l'avenir, ils espèrent que leur système contribuera à l'avancement des mains prothétiques disponibles dans le commerce, réduisant l'effort requis pour les exploiter.
« Ensuite, nous voulons tester le système avec des utilisateurs prothétiques réels et recueillir des commentaires », a ajouté Jiang. « Nous prévoyons également d'améliorer la capacité du système à s'adapter à différents environnements et à des tâches plus complexes, telles que la manipulation d'objets doux ou de forme étrange.
Écrit pour vous par notre auteur Ingrid Fadelli, édité par Lisa Lock, et vérifié et révisé par Robert Egan – cet article est le résultat d'un travail humain minutieux. Nous comptons sur des lecteurs comme vous pour garder le journalisme scientifique indépendant en vie. Si ce rapport vous importe, veuillez considérer un don (surtout mensuel). Vous obtiendrez un sans publicité compte comme un remerciement.