
Le défi de coordonner plusieurs robots sur la lune
Les cadres sont une composante critique, quoique sous-estimée, de toute mission d'exploration spatiale. Ils peuvent aller de l'architecture de mission globale, capturant des objectifs scientifiques et techniques à la structure des messages envoyés entre deux composantes internes du système.
L'un des cadres les plus intéressants qui attire beaucoup d'attention dans la communauté d'exploration spatiale est l'interaction de plusieurs robots dans un seul usage, appelé système à plusieurs robots, ou MRS. En plus de cela, l'un des cadres les plus courants pour les robots sur Terre ou dans l'espace est le système d'exploitation de robots open source (ROS), qui est couramment utilisé pour exécuter tout, des aspirateurs aux camions miniers géants.
Son itération la plus récente, ROS2, utilise même un autre cadre, connu sous le nom de middleware, pour gérer les aspects de la communication des robots tels que la mise en réseau et les données de paquet. Cependant, il existe de nombreux moyens de voies intermédiaires différents pour ROS2, donc une équipe de chercheurs de l'Université du Luxembourg a décidé d'essayer d'en choisir une qui serait la meilleure pour les applications d'exploration planétaire.
L'attrait d'avoir plusieurs robots rampant autour de la lune, explorant tout en se parlant les uns aux autres, est évident. Cependant, la praticité d'un tel système est encore loin de la réalité.
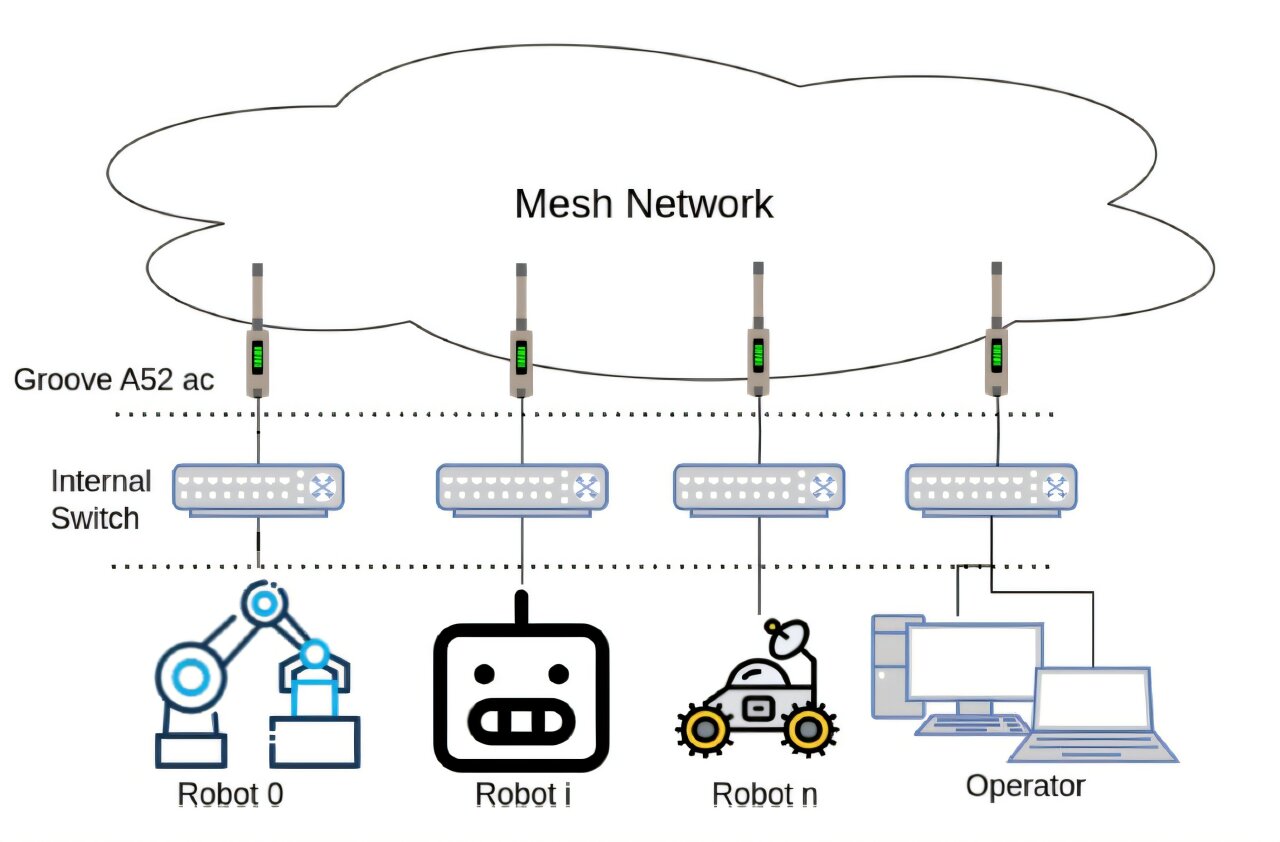
Le candidat le plus probable pour une telle solution est un système de réseautage appelé réseau de maillage. Un réseau traditionnel a un centre central à qui tous les différents sous-nodes parlent, qui gère le traitement et les interfaces à forte intensité de données nécessaires pour maintenir le fonctionnement du réseau.
D'un autre côté, un réseau de maillage permet à chaque nœud de se parler sans avoir besoin d'un centre central. Il présente de nombreux avantages, tels que la stabilité si l'un des nœuds baisse et la flexibilité en trouvant le moyen le plus rapide d'obtenir des données d'un nœud à l'autre. Cependant, il a les inconvénients d'être plus intensif en calcul pour chaque nœud individuel et laggy par rapport au modèle traditionnel plus direct.
Mais étant donné les changements dans le réseau qu'un ensemble mobile de robots subirait tout en explorant les mondes extraterrestres, le maillage semble être la meilleure stratégie.
Dans un Journal des systèmes intelligents et robotiques Document, les chercheurs ont décidé d'examiner trois moyens de centres moyens ROS2 différents pour voir comment ils géreraient un réseau de maillage similaire à celui qu'ils vivraient dans une mission lunaire.
Les trois Middlewares étaient FastDDS, le middleware par défaut le plus courant, Cyclonedds, qui se spécialise dans l'envoi de messages importants, et Zenoh, qui se spécialise dans le traitement des réseaux instables. Le DDS dans le nom des deux premiers représente le service de distribution de données, un protocole commun pour le middleware qui permet à Ros2 de s'interfacer avec un « couche » de réseau, dans le langage des modèles d'ingénierie.
La mesure des performances de chaque middleware impliquerait de calculer cinq variables: que tous les robots puissent être atteints ou non, la quantité de frais généraux que le réseau utilise, combien de temps il faut pour qu'un message atteigne une cible prévue et l'utilisation globale du processeur et de la RAM du robot. Chaque métrique capture une partie de ce qui rend un réseau utilisable, en particulier dans l'espace profond.
Pour tester les différents cadres, les auteurs ont mis en place une expérience réelle. Pourtant, au lieu d'explorer la lune, ils ont mis en place une MME pour explorer l'environnement urbain entourant leur université. Leur Mme était composée d'un lander, de deux rovers et d'une antenne statique. L'un des rovers s'éloignerait progressivement des autres membres tout au long de l'expérience, et les mesures du réseau seraient continuellement capturées sur une gamme de tailles de message.
Ils ont constaté que Zenoh fonctionnait mieux en ce qui concerne la fiabilité du réseau, les frais généraux de données et le retard, bien qu'il ait utilisé un peu plus de puissance de calcul (certes à partir d'une base faible). Cette plate-forme semble bien fonctionner dans les environnements d'exploration spatiale, bien que de grands messages qui écrasent le système, quel que soit le cadre utilisé, était toujours un problème.
Dans l'ensemble, l'expérience décrite dans l'article est une étape vers la coordination des robots qui fonctionnent de concert sur un autre monde. Que la première MRS opérant ou non sur la lune ou Mars utilisera Zenoh ou un autre cadre, ce ne sera qu'une question de temps avant qu'un système de réseautage, probablement un maillage, ne soit en place dans un autre monde.