
Le cadre de planification des tâches prend en charge l'assemblage collaboratif de meubles entre l'homme et le robot
Il est essentiel de veiller à ce que les robots puissent collaborer efficacement avec les humains dans des environnements réels avant de les déployer à grande échelle. Si certains systèmes robotisés interagissent déjà quotidiennement avec des agents humains, par exemple dans des installations industrielles et de fabrication partiellement automatisées, la collaboration homme-robot sur les tâches quotidiennes reste rare.
Des chercheurs de l'Université de Padoue et des laboratoires de recherche Mitsubishi Electric (MERL) de Cambridge ont développé un cadre qui permet de planifier des tâches impliquant une collaboration homme-robot. Ce cadre, présenté dans un article pré-publié sur le site arXiv serveur, se concentre spécifiquement sur les tâches qui impliquent l'assemblage collaboratif de systèmes complexes avec divers composants sous-jacents, tels que des meubles.
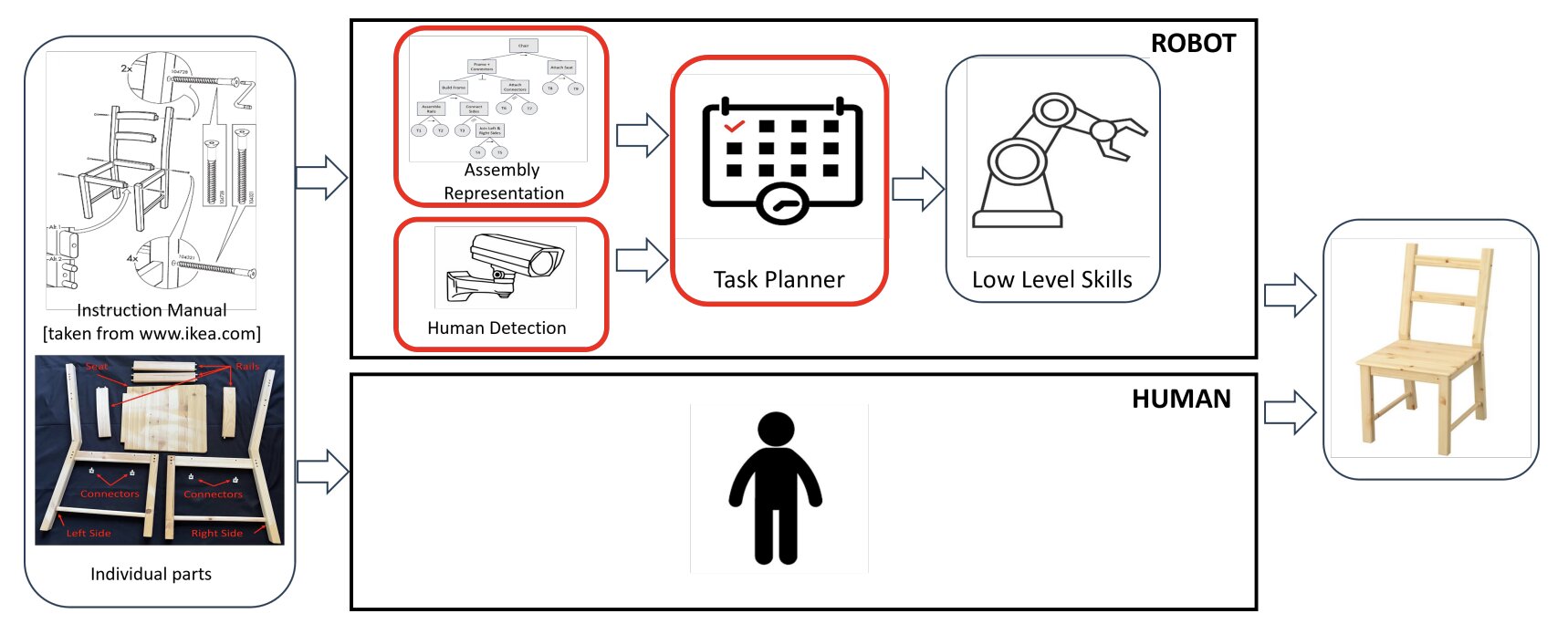
Les chercheurs ont baptisé leur cadre DECAF, qui signifie Discrete-Event based Collaborative Human-Robot Assembly Framework for furniture (Cadre d'assemblage collaboratif homme-robot basé sur des événements discrets pour les meubles). DECAF comporte plusieurs composants sous-jacents, notamment un modèle de processus de décision de Markov à événements discrets (DE-MDP), une description HTM du processus d'assemblage et un module d'interférence bayésien.
« L'humain est caractérisé comme un agent incontrôlable, ce qui implique, par exemple, que l'agent n'est pas lié par une séquence d'actions préétablie et agit plutôt selon ses propres préférences », écrivent Giulio Giacomuzzo, Matteo Terreran et leurs collègues dans leur article. « Pendant ce temps, le planificateur de tâches calcule de manière réactive les actions optimales pour que le robot collaboratif puisse terminer efficacement l'ensemble de la tâche d'assemblage dans le plus bref délai possible. »
Grâce au nouveau framework développé, le processus d'assemblage collaboratif s'étend sur plusieurs étapes. Tout d'abord, le robot observe les actions effectuées par l'agent humain, via une caméra ou d'autres capteurs.
Sur la base de ces observations, le modèle DECAF planifie des actions pour le robot qui maximiseront l'efficacité de l'équipe robot-humain dans l'exécution des tâches d'assemblage à accomplir, tout en adaptant ces actions à la suite d'événements imprévisibles. L'équipe a modélisé l'assemblage de meubles ou d'autres objets en utilisant un cadre mathématique souvent utilisé pour encadrer des processus de prise de décision spécifiques, connu sous le nom de DE-MDP.
« Nous formalisons le problème sous le nom DE-MDP, un cadre complet qui intègre une variété de comportements asynchrones, de changements d'état d'esprit humains et de récupération après échec en tant qu'événements stochastiques », ont écrit Giacomuzzo, Terreran et leurs collègues.
« Bien que le problème puisse théoriquement être résolu en construisant un graphique de toutes les actions possibles, une telle approche serait limitée par des limitations informatiques. La formulation proposée offre une solution alternative utilisant l'apprentissage par renforcement pour dériver une politique optimale pour le robot. »
Essentiellement, le modèle DE-MDP est utilisé pour décomposer une tâche d'assemblage et identifier les actions optimales qui permettraient au robot de s'y attaquer efficacement en collaboration avec un agent humain. Le deuxième composant du cadre DECAF, à savoir le modèle HTM, encode l'interdépendance entre diverses sous-tâches, facilitant ainsi le processus de planification.
Enfin, l’équipe a intégré un module basé sur une approche statistique connue sous le nom d’interférence bayésienne, qui est généralement utilisée pour mettre à jour en continu la probabilité qu’une hypothèse donnée soit vraie à mesure que de nouvelles informations deviennent disponibles. Ce module permet au framework de surveiller les actions de l’agent humain et de les utiliser pour prédire les intentions d’un agent humain.
Les chercheurs ont évalué le DECAF dans une série de tests, en simulation et en situation réelle. Pour l'expérience réelle, 10 participants adultes ont été invités à assembler une chaise achetée chez IKEA en collaboration avec un manipulateur robotique à 7 degrés de liberté (c'est-à-dire le bras Panda de Franka Emika).
Les résultats des premiers tests réalisés par l’équipe se sont révélés très prometteurs. Dans les simulations, le cadre DECAF s’est avéré plus performant que les politiques de planification standard, tandis que dans les expériences en conditions réelles, il semblait améliorer l’efficacité et la qualité de la collaboration homme-robot.
« À l’avenir, nous prévoyons d’inclure d’autres mesures optimales au-delà du temps d’exécution, telles que la sécurité humaine, la corrélation des actions et l’ergonomie humaine », ont écrit les chercheurs.