
Un ensemble de données de pose 6D innovant établit une nouvelle norme en matière de performances de préhension robotique
L’estimation précise de la pose d’un objet fait référence à la capacité d’un robot à déterminer à la fois la position et l’orientation d’un objet. Il est essentiel pour la robotique, en particulier pour les tâches de sélection et de placement, qui sont cruciales dans des secteurs tels que l’industrie manufacturière et la logistique.
Alors que les robots sont de plus en plus chargés d’opérations complexes, leur capacité à déterminer avec précision les six degrés de liberté (pose 6D) des objets, leur position et leur orientation devient critique. Cette capacité garantit que les robots peuvent interagir avec les objets de manière fiable et sûre. Cependant, malgré les progrès de l’apprentissage profond, les performances des algorithmes d’estimation de pose 6D dépendent largement de la qualité des données sur lesquelles ils sont formés.
Une nouvelle étude présente un ensemble de données méticuleusement conçu visant à améliorer les performances des algorithmes d’estimation de pose 6D. Cet ensemble de données comble une lacune majeure dans la recherche sur la préhension et l’automatisation robotique en fournissant une ressource complète qui permet aux robots d’effectuer des tâches avec une plus grande précision et une plus grande adaptabilité dans des environnements réels. Cette étude a été publiée dans la revue Résultats en ingénierie en décembre 2024.
Assoc. Le professeur Phan Xuan Tan de l’Institut de technologie Shibaura, au Japon, déclare : « Notre objectif était de créer un ensemble de données qui non seulement fasse progresser la recherche, mais aborde également les défis pratiques de l’automatisation robotique industrielle. Nous espérons qu’il constituera une ressource précieuse pour les chercheurs et les ingénieurs. même. »
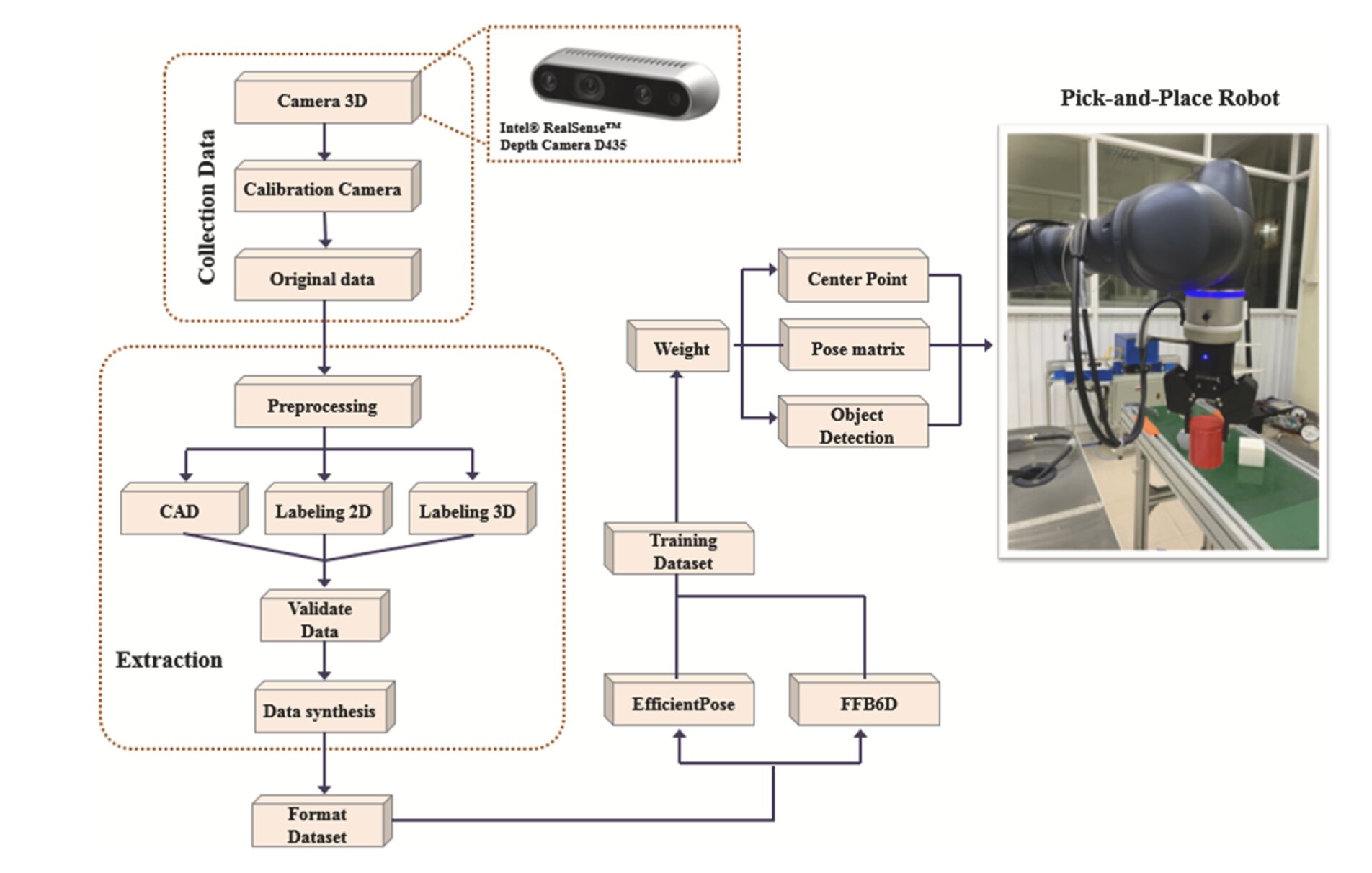
L’équipe de recherche a créé un ensemble de données qui non seulement répond aux demandes de la communauté des chercheurs, mais qui est également applicable dans des contextes industriels pratiques. À l’aide de la caméra Intel RealSense Deep D435, ils ont capturé des images RVB et en profondeur de haute qualité, annotant chacune avec une rotation des données de pose 6D et une translation des objets. L’ensemble de données présente une variété de formes et de tailles, avec des techniques d’augmentation des données ajoutées pour garantir sa polyvalence dans diverses conditions environnementales. Cette approche rend l’ensemble de données hautement applicable à un large éventail d’applications robotiques.
« Notre ensemble de données a été soigneusement conçu pour être pratique pour les industries. En incluant des objets de formes et de variables environnementales variables, il constitue une ressource précieuse non seulement pour les chercheurs mais également pour les ingénieurs travaillant dans des domaines où les robots opèrent dans des conditions dynamiques et complexes », ajoute Assoc. . Professeur Tan.
. DOI : 10.1016/j.rineng.2024.103459")
L’ensemble de données a été évalué à l’aide de modèles d’apprentissage profond de pointe, EfficientPose et FFB6D, atteignant des taux de précision de 97,05 % et 98,09 %, respectivement. Les taux de précision élevés prouvent que l’ensemble de données fournit des informations de pose fiables et précises, essentielles pour des applications telles que la manipulation robotique, le contrôle qualité dans la fabrication et les véhicules autonomes. Les bonnes performances de ces algorithmes sur l’ensemble de données soulignent le potentiel d’amélioration des systèmes robotiques nécessitant de la précision.
Assoc. Le professeur Tan déclare : « Bien que notre ensemble de données comprenne une gamme de formes de base telles que des prismes rectangulaires, des trapèzes et des cylindres, son élargissement pour inclure des objets plus complexes et irréguliers le rendrait plus applicable aux scénarios du monde réel.
« Bien que la caméra Intel RealSense Depth D435 offre d’excellentes données de profondeur et RVB, la dépendance de l’ensemble de données sur celle-ci peut limiter son accessibilité pour les chercheurs qui n’ont pas accès au même équipement. »
Malgré ces défis, les chercheurs sont optimistes quant à l’impact de l’ensemble de données. Les résultats démontrent clairement qu’un ensemble de données bien conçu améliore considérablement les performances des algorithmes d’estimation de pose 6D, permettant aux robots d’effectuer des tâches plus complexes avec une précision et une efficacité supérieures.
« Les résultats en valent la peine », déclare Assoc. Professeur Tan. Pour l’avenir, l’équipe prévoit d’élargir l’ensemble de données en incorporant une plus grande variété d’objets et en automatisant certaines parties du processus de collecte de données pour le rendre plus efficace et plus accessible. Ces efforts visent à améliorer davantage l’applicabilité et l’utilité de l’ensemble de données, au bénéfice à la fois des chercheurs et des industries qui s’appuient sur l’automatisation robotique.
L’étude a été dirigée par le professeur agrégé Tan, College of Engineering, Shibaura Institute of Technology, Japon, avec son équipe de chercheurs, le Dr Van-Truong Nguyen, M. Cong-Duy Do et le Dr Thanh-Lam Bui du Université d’industrie de Hanoï, Vietnam, professeur agrégé Thai-Viet Dang de l’Université des sciences et technologies de Hanoï, Vietnam.