
Première enquête approfondie sur le thème de l’apprentissage par transfert profond pour la perception des véhicules intelligents
Un groupe international de scientifiques a publié un article dans la revue Énergie verte et transports intelligentsrésumant un examen complet de l’apprentissage par transfert profond pour la perception des véhicules intelligents.
Ces dernières années, la perception a été considérée comme un élément essentiel des véhicules intelligents pour une localisation précise, une planification de mouvement sûre et un contrôle robuste. Le système de perception fournit aux véhicules intelligents des informations environnementales immédiates sur les piétons, les véhicules, les panneaux de signalisation et d’autres éléments environnants et aide à éviter d’éventuelles collisions.
La perception des véhicules intelligents basée sur l’apprentissage profond s’est développée de manière importante pour fournir une source fiable pour la planification des mouvements et la prise de décision en matière de conduite autonome. De nombreuses méthodes puissantes basées sur l’apprentissage profond peuvent atteindre d’excellentes performances dans la résolution de divers problèmes de perception de la conduite autonome.
Cependant, ces méthodes de deep learning présentent encore plusieurs limites ; par exemple, l’hypothèse selon laquelle les données de formation en laboratoire (domaine source) et de tests réels (domaine cible) suivent la même distribution de caractéristiques peut ne pas être pratique dans le monde réel. Il existe souvent un écart de domaine considérable entre eux dans de nombreux cas réels.
En guise de solution à ce défi, l’apprentissage par transfert profond peut parfaitement gérer les situations en transférant les connaissances d’un domaine à un autre. L’apprentissage par transfert profond vise à améliorer les performances des tâches dans un nouveau domaine en tirant parti des connaissances de tâches similaires précédemment apprises dans un autre domaine.
Il n’existe actuellement aucun document d’enquête sur le thème de l’apprentissage par transfert profond pour la perception des véhicules intelligents. Ce nouveau document d’enquête vise à contribuer à introduire et à expliquer les techniques d’apprentissage par transfert profond pour la perception des véhicules intelligents, offrant ainsi des informations et des orientations inestimables pour les recherches futures.
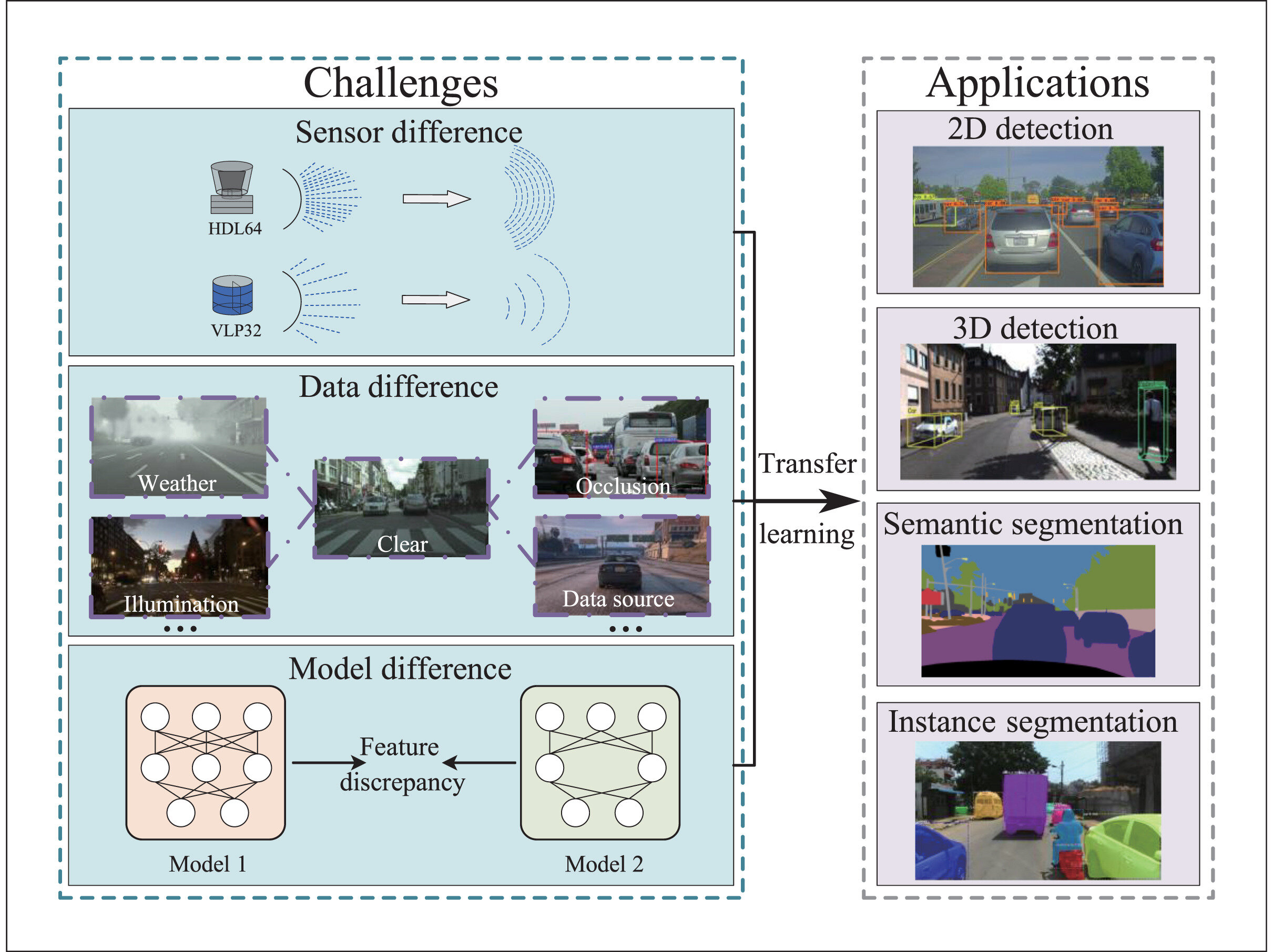
Pour les véhicules intelligents ou la conduite autonome, la perception joue un rôle crucial dans la réception des données des capteurs et l’extraction d’informations significatives de l’environnement environnant, afin de prendre des décisions significatives pour une planification précise des mouvements en identifiant les obstacles, les panneaux de signalisation/balises et les zones de conduite disponibles. Les chercheurs ont regroupé ces tâches de perception intelligente des véhicules en deux classes (détection d’objets, segmentation sémantique/instance).
Malgré les réalisations remarquables des algorithmes de perception des véhicules intelligents sur des ensembles de données de référence, il existe encore des défis importants dans le monde réel en raison des grandes variations dans les types et paramètres de capteurs, les données de styles divers, l’environnement, la météo et l’éclairage, l’époque d’entraînement et architecture.
Sur la base de ces observations, les chercheurs ont divisé l’écart de distribution de domaine pour la perception des véhicules intelligents en trois types : différence de capteur, différence de données et différence de modèle.
Avec l’évolution rapide des techniques de conduite autonome, de nombreuses images de scènes de conduite sont désormais disponibles. Les méthodes d’apprentissage profond sont en plein essor dans l’application de la conduite autonome avec une perception de haute performance.
L’apprentissage par transfert (TL) est une méthode d’apprentissage automatique permettant d’appliquer largement les connaissances acquises d’une tâche ou d’un domaine à une autre tâche ou domaine connexe. Les chercheurs ont classé l’apprentissage par transfert profond en plusieurs types principaux : TL supervisé, TL non supervisé, TL faiblement et semi-supervisé, généralisation de domaine.
Les principaux défis de l’apprentissage par transfert profond pour la perception actuelle des véhicules intelligents comprennent la robustesse des capteurs, les limites de la méthodologie, le réalisme des données synthétiques, la rareté des références annotées dans des scénarios complexes, les normes internationales pour les capteurs matériels et les normes internationales pour les progiciels.
Afin de relever les défis ci-dessus, les travaux suivants seront entrepris à l’avenir :
- Premièrement, davantage de recherches devraient être axées sur l’amélioration de la robustesse des capteurs.
- Deuxièmement, les chercheurs pourraient s’efforcer de développer des méthodes d’apprentissage par transfert profond plus avancées.
- Troisièmement, le réalisme des données synthétiques peut être amélioré par des moteurs de jeux informatiques plus avancés.
De plus, davantage d’ensembles de données de référence de haute qualité dans des scénarios de conduite complexes pourraient être collectés et publiés. Enfin, plusieurs entreprises de différents pays peuvent collaborer pour promouvoir des normes internationales pour les capteurs matériels et les progiciels.
Fourni par l’énergie verte et le transport intelligent