
Un nouvel ensemble de données de haute qualité pour former des algorithmes de robotique sur les tâches de manipulation textile
De nombreux processus industriels et tâches ménagères actuellement accomplies par les humains impliquent la manipulation de textiles, y compris des vêtements, des feuilles, des serviettes, des chiffons et d’autres objets à base de tissu. La plupart des systèmes robotiques développés jusqu’à présent ne manipulent pas de manière fiable tous les types de textiles, en raison des défis associés à la prévision de la façon dont ces objets se déformeront lorsqu’ils sont saisis et manipulés.
Des chercheurs de l’Institut de Robòtica I Informàtica Industrial (CSIC-UPC) et Universitat Policècnica de Catalunya ont compilé un nouvel ensemble de données qui pourrait être utilisé pour former des algorithmes de robotique afin de prédire la déformation des chiffons et d’élaborer des stratégies efficaces pour les manipuler.
Cet ensemble de données, présenté dans un article publié dans le Journal international de recherche en robotiquea été collecté à l’aide d’un système de capture de mouvement (MOCAP) qui ramasse et suit la lumière infrarouge à partir de marqueurs placés sur différents textiles.
« La manipulation automatique du tissu par les robots est une application potentielle qui pourrait avoir un impact sur la société et l’industrie », a déclaré Franco Coltraro, premier auteur du journal, à Tech Xplore.
«De nos jours, à la maison et pratiquement dans toute entreprise où le tissu est pertinent, les textiles sont manipulés manuellement par les humains. Pensez à plier le tissu dans les magasins, en faisant des lits dans les hôtels, en manipulant les retours de vêtements provenant des achats en ligne: tout est manipulé par les humains.
« La raison est simple: la manipulation du tissu automatiquement est très difficile, car le tissu se déforme très librement, entre en collision avec lui-même et interagit avec l’air de manière très compliquée. Ainsi, une myriade de problèmes mathématiques et d’ingénierie doivent être résolus pour permettre la manipulation automatique des tissus. »
Ces dernières années, certains chercheurs ont tenté de surmonter les défis associés à la manipulation de tissus robotiques en utilisant l’intelligence artificielle (IA). Pour bien performer, cependant, la plupart des modèles basés sur l’IA et l’apprentissage automatique doivent être formés sur de grandes quantités de données.
La collecte d’une grande quantité de données décrivant la déformation de différents textiles peut être très coûteuse et longue. Par conséquent, jusqu’à présent, de nombreux roboticiens ont plutôt utilisé des simulateurs dits de tissu, des systèmes conçus pour simuler des tissus en différents matériaux.
« Il existe de nombreux simulateurs en tissu différents (la plupart provenant de l’industrie du jeu vidéo et de l’animation) », a déclaré Coltraro.
« Même je l’ai développé. Le fait est que la plupart des simulateurs en tissu n’étaient pas conçus pour être utilisés dans la robotique, mais pour être utilisés dans les films et les jeux vidéo; donc, la plupart d’entre eux ne sont pas très réalistes. Les quelques simulateurs en tissu qui sont réalistes (par exemple, les miens, si je peux le dire) ont des paramètres qui doivent être ajustés ou estimés pour s’adapter au comportement réel. »
L’objectif clé de la récente étude de Coltraro et de ses collègues était de compiler un nouvel ensemble de données de haute qualité qui pourrait aider à améliorer les données générées par les simulateurs en tissu. Pour ce faire, ils ont collecté 120 enregistrements, montrant les mouvements de divers textiles, en utilisant un système MOCAP.
« Les enregistrements que nous avons collectés peuvent aider à régler les paramètres des simulateurs en tissu », a déclaré Coltraro. « Ensuite, ces simulateurs en tissu réglé peuvent être utilisés pour générer d’énormes quantités de données à moindre coût, ce qui permet à son tour la formation des modèles d’IA. Notre espoir est qu’à l’avenir, ces algorithmes d’IA peuvent résoudre le problème de la manipulation robotique des tissus. »
Le système MOCAP que les chercheurs ont utilisé pour collecter leurs données repose sur des marqueurs minuscules et très légers (c’est-à-dire pesant moins de 0,013 grammes) qui reflètent la lumière infrarouge. Ces marqueurs légers ont été placés sur des tissus de différentes tailles et faits de divers matériaux, pour suivre leur déformation au fil du temps sans influencer leurs mouvements.
« Nous avons utilisé beaucoup de caméras pour suivre ces marqueurs réfléchissants et donc savoir où ils se trouvent dans l’espace », a déclaré Coltraro.
« L’avantage de l’utilisation de MOCAP par rapport à d’autres approches (c’est-à-dire des caméras de profondeur, comme la Xbox Kinect) est que les enregistrements sont super lisses (presque pas de bruit) et que l’on peut enregistrer beaucoup de mouvements variés car les caméras peuvent entourer la scène (nous pouvons minimiser les auto-occlusions en tissu). »
Coltraro et leurs collègues ont enregistré des vêtements de deux tailles et composé de quatre matériaux différents, à savoir le coton, le denim, la laine et le polyester. Ces chiffons ont été enregistrés à différentes vitesses, pour montrer comment elles se déforment lorsqu’elles sont manipulées différemment.
 soit visible à au moins deux caméras en même temps. À droite: marqueurs réfléchissants attachés à l'échantillon denim, avec un diamètre de 3 mm et un poids de 0,013 g. Crédit: Franco Coltraro.")
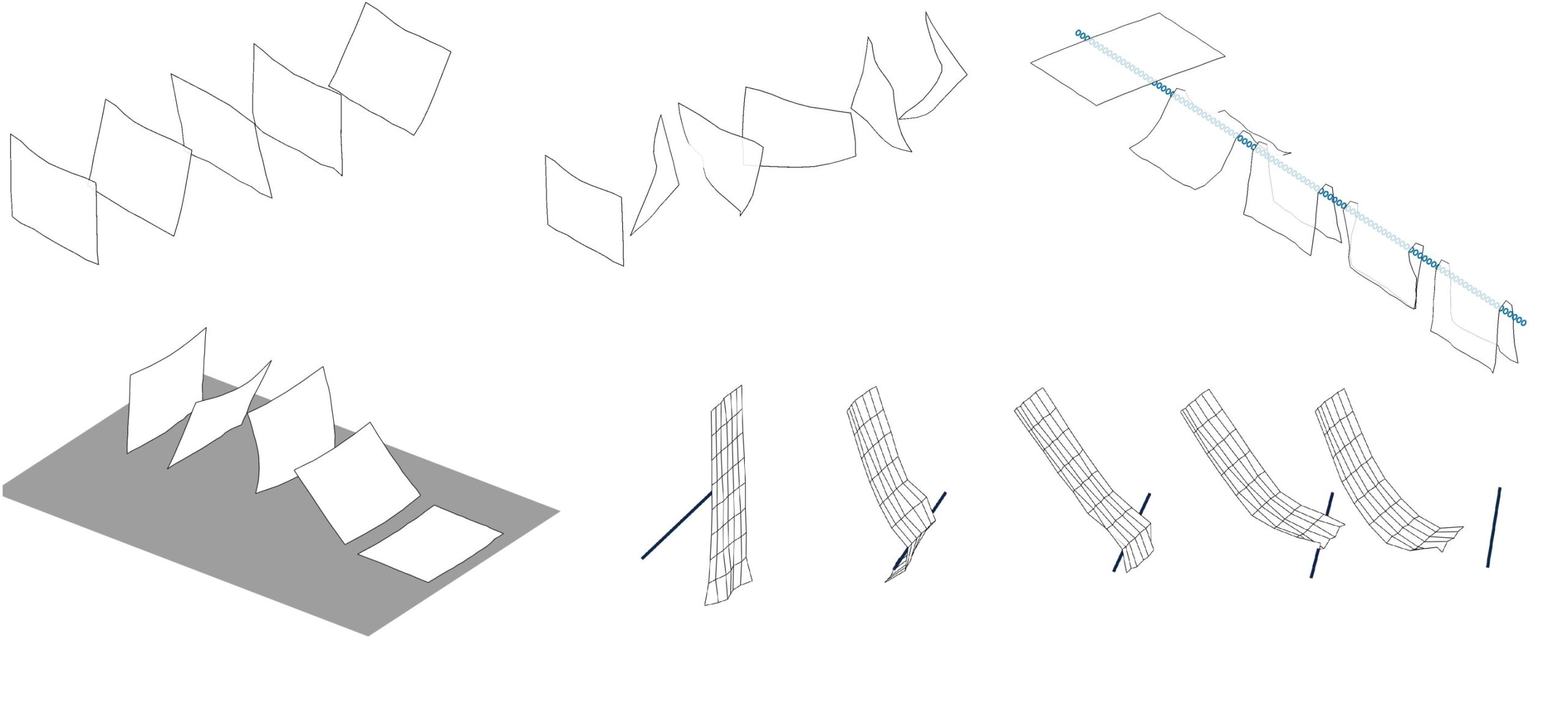
Lorsque les données MOCAP ont été enregistrées, les chiffons ont été manipulés de manière spécifique qui reflétait les scénarios du monde réel. Par exemple, les chercheurs les ont secoués, les ont tordues, les ont frottés sur des objets de friction, les ont frappés avec un long outil rigide et les ont même frappés les uns contre les autres.
« L’une des résultats les plus notables et les plus inattendus de cette étude a été la variation du mouvement en tissu même avec le même tissu et le même mouvement », a déclaré Coltraro.
« Nous avons pris l’échantillon de polyester DIN A3 et exécuté plusieurs fois le même mouvement avec un robot et le tissu. Le mouvement plaçait le tissu dynamiquement sur une table. Vous vous attendez à ce que l’état final du tissu soit le même à chaque fois, non?
« Même avec un robot (il a exécuté exactement la même trajectoire sans erreur), nous avons trouvé une variation dans l’état final (pas énorme mais certains). Je pense que cela est lié à la théorie du chaos et peut être un autre défi pour la manipulation de tissu. »
Le nouvel ensemble de données créé par Coltraro et ses collègues pourraient bientôt être utilisés pour régler les simulateurs en tissu, améliorant la qualité des simulations qu’ils produisent. Cela pourrait conduire à la génération de nouveaux ensembles de données contenant des déformations et des mouvements de tissus réalistes mais simulés, qui pourraient à leur tour être utilisés pour former des modèles d’IA pour la manipulation robotique des tissus.
« Dans mes prochaines études, je prévois d’utiliser mon propre simulateur de tissu insttensible pour développer des algorithmes pour manipuler le tissu avec des robots », a ajouté Coltraro.
« Je vais utiliser les données de cet article pour régler mon simulateur pour qu’il corresponde au comportement des chiffons réels, puis développer des algorithmes de manipulation. Des problèmes ouverts que je m’attaquent sont à modéliser l’aérodynamique des textiles et à étudier mathématiquement les états de déformation possibles que le tissu peut présenter et comment naviguer à travers eux. »