
Robotique cognitive et nouvelles technologies de sécurité pour la collaboration par l'homme-robot
Des chercheurs du Fraunhofer Institute for Factory Operation and Automation IFF ont développé des capacités de robot cognitif qui peuvent gérer des tâches complexes dans la fabrication qui étaient auparavant impossibles à automatiser. En outre, ils dévoilent également PARU et la sécurité assistée par ordinateur (CAS), les premières technologies de sécurité et les outils de planification pour une collaboration étroite de la machine humaine qui peut également garantir la sécurité dans les mouvements de robots générés par l'IA.
Les chercheurs démontreront ce que la robotique cognitive peut faire et comment la surveillance dynamique des espaces de travail fonctionne à Automatica 2025 à Munich du 24 au 27 juin 2025 (Hall A4, stand 319).
Des chercheurs de Fraunhofer IFF exploitent de nouvelles solutions basées sur l'IA pour donner aux robots les capacités cognitives dont ils ont besoin pour opérer de manière autonome dans des environnements non structurés et pour automatiser des processus complexes tels que l'assemblage et le démontage dans des environnements industriels ou la manipulation d'objets en milieu de soins de santé.
Les technologies de sécurité basées sur la projection et basées sur la caméra permettent aux robots avec un contrôle de mouvement basé sur l'IA de répondre de manière fiable aux modifications, de s'adapter aux nouvelles tâches et de faire fonctionner une application en toute sécurité. Cela ouvre un large éventail de nouveaux domaines d'application qui étaient auparavant fermés à la robotique conventionnelle, qui est limitée à des tâches spécifiques et définies étroitement.
« Les robots cognitifs peuvent apprendre de l'expérience, prendre des décisions indépendantes et s'adapter à divers scénarios. Pour les tâches de pick-and-place impliquant la ramassage des composants et les placer là où ils doivent aller, un robot cognitif n'a plus besoin d'apprendre à quoi ressemblent les pièces individuelles avant de les saisir.
« Au lieu de cela, il utilise une caméra pour enregistrer la taille, la forme, la texture et l'état de l'objet et ajuste son comportement en conséquence. Dans le processus, il peut gérer différentes conditions environnementales et même différents matériaux d'emballage », explique Magnus Hanses, chef du groupe de robotique cognitif à Fraunhofer IFF.
Utilisation de la simulation pour former des modèles d'IA
Les experts utilisent des environnements simulés pour former les modèles d'IA utilisés. Par exemple, ils simulent des processus d'assemblage et de démontage tels que la suppression d'une carte mère d'un ordinateur. Un certain nombre de robots virtuels peuvent fonctionner dans l'espace numérique en même temps et à un rythme beaucoup plus rapide sans aucun problème de sécurité.
Il existe de nombreux avantages à l'apprentissage dans la simulation numérique, mais il a également une vulnérabilité. L'environnement d'apprentissage virtuel n'est jamais 100% le même que le monde réel. Le défi pour les chercheurs est de combler cette lacune de réalité, également connue sous le nom de Sim2Real Gap, autant que possible.
Il y a deux approches possibles ici. La simulation peut être conçue pour être aussi réaliste que possible, soit elle peut englober la gamme la plus large possible de versions réelles, de sorte que le réseau neuronal utilisé pour l'IA apprend à généraliser et à trouver son chemin dans des environnements inconnus.
Une façon dont les chercheurs y parviennent est par le biais de randomisation de domaine. Cette approche leur permet de créer un grand nombre d'environnements simulés avec des propriétés aléatoires et de former un modèle qui fonctionne dans chacun d'eux.
« Il existe de nombreux paramètres différents, tels que l'éclairage, qui affectent la simulation. Nous pouvons modifier cet ensemble de paramètres pendant la formation. Le robot n'apprend pas à résoudre la simulation exacte. Au lieu de cela, il s'agit de comprendre le concept abstrait derrière. La réalité ne devient qu'une autre version d'une simulation pour l'IA, si vous voulez », explique Hanses.
PARU – UNIQUE, SPÉDICATION BUTEMENT ET SPECURATION
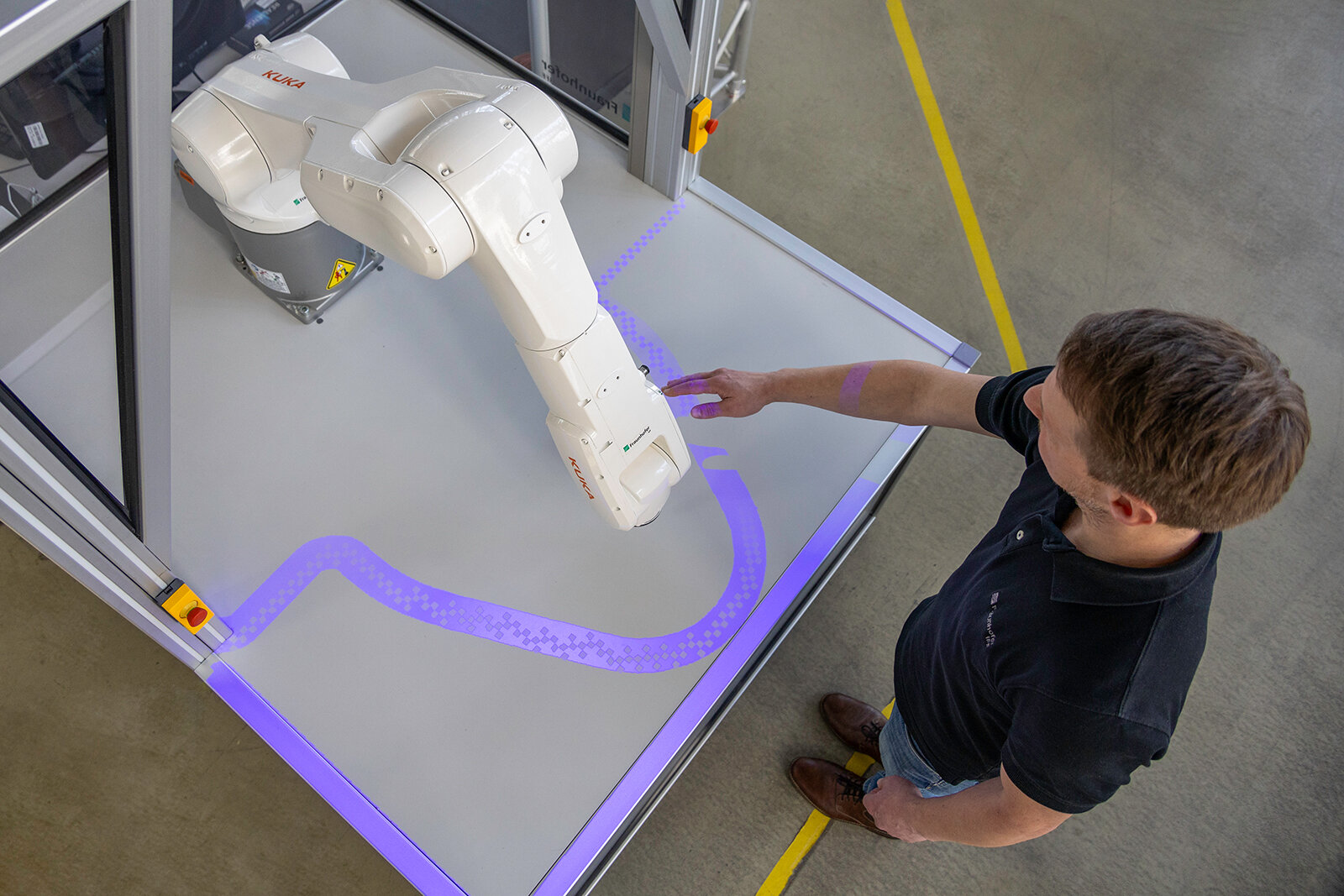
Mais le domaine de la robotique cognitive est toujours confronté à un autre défi: à l'heure actuelle, il n'y a aucun moyen d'assurer la sécurité des mouvements de robots générés par l'IA conformément aux normes de sécurité. Pour que les robots basés sur l'IA puissent interagir avec les humains dans un environnement sûr, les chercheurs de Fraunhofer IFF ont développé PARU, une nouvelle technologie brevetée pour surveiller les espaces de travail. PARU utilise la technologie avancée du projecteur et de la caméra pour projeter des champs d'avertissement et de protection visibles directement autour de la machine et reconnaître quand les gens entrent dans les zones de sécurité.
« Une fois que le projecteur et les deux caméras sont calibrés, des images d'attente virtuelles sont générées comme première étape. Ensuite, le projecteur projette un rideau lumineux visible autour du robot et du composant qui doit être ramassé conformément à la formule de distance énoncée dans la norme pertinente, ISO / TS 15066. Cet rideau lumineux acte comme une ligne de sécurité, visualisant les employés de l'espace protège du département des systèmes robotiques de Fraunhofer IFF.
« Si une partie du corps d'un travailleur entre en contact avec la ligne, la ligne est interrompue. Les caméras reconnaissent qu'il y a une différence entre ce qu'il s'attend à voir et l'image du monde réel. Selon la situation, le robot s'arrête immédiatement ou ralentit sa vitesse. »
Les lignes de sécurité visibles favorisent la confiance
Les zones de sécurité sont ajustées dynamiquement aux mouvements de la machine, car PARU considère toujours le statut actuel du robot, ce qui rend idéal pour une utilisation dans la robotique cognitive. « Notre technologie est unique. Aucun autre système ne permet une distance plus petite entre les humains et les robots tout en observant les spécifications fixées par les normes applicables et aussi nécessitant un si peu d'espace. Cela est possible parce que les caméras et les capteurs reconnaissent non seulement les torses, les bras et les têtes, mais même les doigts », dit Elkmann.
Un autre avantage est que la projection peut également montrer au travailleur où le robot se déplacera comme prochaine étape, améliorant davantage la confiance dans le travail avec les machines. Les lignes de sécurité visibles codées en plus fonctionnent indépendamment des angles et des conditions d'éclairage ambiant. Si les caméras ou les projecteurs cessent de fonctionner, l'ensemble du système est automatiquement éteint.
CAS: Solutions logicielles intelligentes pour les systèmes de robots adaptatifs
Également chez Automatica 2025, Fraunhofer IFF présentera une sécurité assistée par ordinateur (CAS), un ensemble de solutions de sécurité numérique qui rendent les applications de collaboration (HRC) (HRC) efficaces.
Les modules logiciels prêts pour le produit sont disponibles pour un calcul efficace des distances et des vitesses sûres. Les assistants numériques soutiennent les processus d'évaluation des risques et d'approbation de la sécurité et facilitent les nouveaux entrants en particulier de se conformer avec précision et efficacement à la gamme complète des obligations en vertu de la directive de machines de l'UE.
Contrairement à la fonction de mesure des collisions, l'outil d'approbation de sécurité fonctionne entièrement numériquement. Il prend en compte des paramètres tels que la force de collision et le seuil de douleur pour déterminer la vitesse maximale autorisée du robot.
Les modules peuvent éventuellement être incorporés dans tout type de commandes de robots ou d'environnements de simulation existants à des fins de planification afin d'aligner précisément les spécifications économiques avec les exigences de sécurité applicables. Cela empêche les erreurs de planification et économise sur les coûts d'ingénierie.
Le CAS a été conçu sur la base des données collectées à partir des années de tests uniques avec des sujets, qui ont donné de nouvelles limites de seuil et d'autres indicateurs biomécaniques clés pour le HRC sûr. Les charges de collision et de serrage fixées sur un pendule spécialement conçu ont été utilisées pour identifier le seuil de douleur par des tests de plus de 100 sujets humains. Le comité d'éthique et le Département de chirurgie des traumatismes de l'Université Otto von Guericke Magdeburg ont soutenu Fraunhofer IFF pendant les études.
Les chercheurs de Fraunhofer IFF montreront comment leurs robots contrôlés par l'IA, la nouvelle technologie de sécurité Paru et les modules logiciels CAS fonctionnent dans la pratique (y compris travailler ensemble) au stand conjoint de Fraunhofer dans le Hall A4 au salon Automatica du 24 juin au 27, 2025.