
L'IA aide les robots à rester sur la bonne voie sans carte
Naviguer sans carte est une tâche difficile pour les robots, surtout lorsqu'ils ne peuvent pas déterminer de manière fiable où ils se trouvent. Une nouvelle solution alimentée par AI aide les robots à surmonter ce défi en les formant à prendre des décisions de mouvement qui protègent également leur capacité à se localiser. Au lieu de se diriger aveuglément vers une cible, le robot évalue la richesse visuelle de son environnement et favorise les voies où il est moins susceptible de se «perdre».
En combinant l'apprentissage en renforcement profond (DRL) avec une rétroaction en temps réel sur l'estimation de la pose, cette approche permet aux robots d'éviter à la fois les collisions et les défaillances de localisation. Le résultat: une navigation plus intelligente, de meilleures performances dans des environnements délicats et une étape majeure vers des systèmes autonomes qui comprennent vraiment leurs limites.
Les méthodes de navigation par robot traditionnelles nécessitent des cartes détaillées ou supposent que la localisation précise est toujours disponible – des hypothèses qui se décomposent dans des environnements intérieurs ou inconnus. Les systèmes visuels de localisation et de cartographie simultanés (SLAM), souvent utilisés comme secours, peuvent facilement échouer dans des scènes dépourvues de textures distinctes ou lors de mouvements brusques, conduisant à de graves erreurs de navigation.
De nombreux modèles d'IA précédents se sont concentrés uniquement sur la recherche de chemins sans collision, ignorant si le robot pouvait rester correctement localisé en cours de route. Même ceux qui considèrent la localisation reposent souvent sur des seuils de pénalité rigides, incapables de s'adapter aux conditions changeantes. En raison de ces défis, une stratégie de navigation plus flexible et axée sur la sensibilisation est urgente pour que les robots se produisent de manière fiable dans divers scénarios du monde réel.
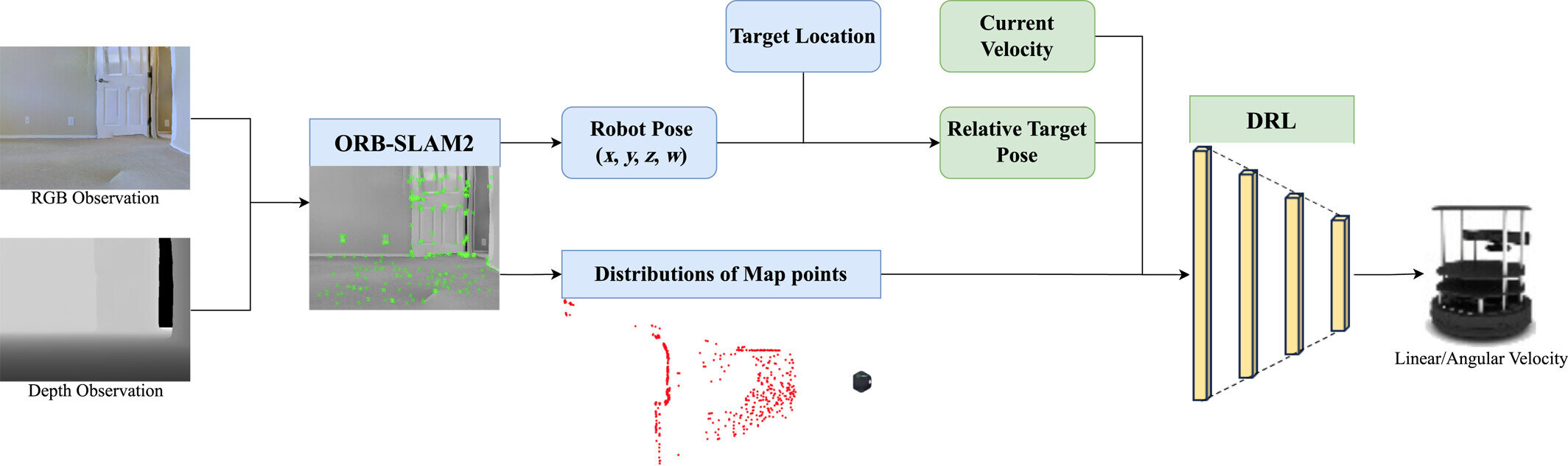
Une équipe de recherche de l'Université de Cardiff et de l'Université Hohai a développé un nouveau modèle d'apprentissage en renforcement profond (DRL) qui aide les robots à planifier des chemins plus intelligents et plus sûrs dans des environnements intérieurs complexes. Leur étude, publiée dans Cyber-systèmes et robotiques IET En juillet 2025, introduit une politique de navigation consciente de la localisation formée avec les entrées de la caméra RVB-D et les commentaires en temps réel d'Orb-SLAM2.
Plutôt que de s'appuyer sur des seuils prédéfinis ou des cartes fixes, le robot apprend à s'adapter dynamiquement aux conditions visuelles dans son environnement, ce qui a obtenu sa capacité à maintenir la localisation et à améliorer considérablement les taux de réussite de navigation dans les tests simulés.
L'innovation principale réside dans l'intégration de la qualité de la localisation dans chaque décision de navigation. Le robot est formé à l'aide d'une représentation d'état compacte qui reflète la distribution spatiale des points de carte visuelle, partitionnée dans 24 régions angulaires autour de son corps. Cette conception aide le robot à identifier quelles directions sont visuellement «plus sûres» à traverser – les zones de conception sont plus susceptibles de fournir des données de localisation fiables.
De plus, les chercheurs ont introduit une nouvelle fonction de récompense basée sur une erreur de pose relative (RPE), offrant une rétroaction instantanée sur le fait qu'une action de mouvement particulière améliore ou aggrave la compréhension du robot de sa position. Contrairement aux modèles précédents qui utilisaient des seuils statiques, ce système utilise un seuil dynamique qui s'ajuste en temps réel, selon les conditions environnementales.
Pour évaluer l'approche, l'équipe a mené une formation approfondie en utilisant l'environnement de simulation Igibson et a testé son modèle contre quatre méthodes de base. Dans des scénarios intérieurs difficiles, le nouveau modèle a surpassé les autres par une large marge, atteignant un taux de réussite de 49% contre seulement 33% pour la navigation conventionnelle à base de slam.
Il a également montré une erreur de localisation significativement plus faible et une meilleure adaptabilité dans de nouveaux environnements. Notamment, le modèle a systématiquement choisi des routes plus longues, mais plus sûres – selon la valeur de la hiérarchisation de la robustesse de la localisation par rapport à l'efficacité du chemin le plus court.
« Notre objectif n'était que d'enseigner au robot à bouger – c'était de lui apprendre à réfléchir à la façon dont il sait où il se trouve », a déclaré le Dr Ze Ji, l'auteur principal de l'étude. « La navigation n'est pas seulement pour éviter les murs; il s'agit de maintenir la confiance dans votre position à chaque étape. En intégrant la perception et la planification, notre modèle permet un mouvement plus intelligent et plus sûr dans des espaces incertains.
Les implications de ce travail s'étendent dans la robotique intérieure – des robots de service dans les hôpitaux et les maisons aux systèmes d'automatisation des entrepôts. Dans les environnements où les médecins généralistes ne fonctionnent pas et les conditions visuelles varient, il est crucial de pouvoir évaluer et répondre à la fiabilité de la localisation. Cette méthode offre aux robots la sensibilisation pour ajuster leurs stratégies en fonction de la façon dont ils peuvent voir et comprendre leur environnement.
Dans l'attente, l'équipe prévoit de tester son modèle sur de vrais robots et dans des scènes dynamiques avec des piétons. Avec un développement ultérieur, l'approche pourrait devenir un élément de construction clé pour une navigation fiable et sans cartographie dans des environnements humains réels.
Fourni par l'Université du Zhejiang