
Les robots humanoïdes simulés apprennent à faire une randonnée de terrain accidenté de manière autonome
La formation de robots humanoïdes à faire de la randonnée pourrait accélérer le développement d'une IA incarnée pour des tâches telles que la recherche et le sauvetage autonomes, la surveillance écologique dans des endroits inexplorés et plus encore, disons des chercheurs de l'Université du Michigan qui ont développé un modèle d'IA qui donne des humanoïdes à parcourir les sentiers.
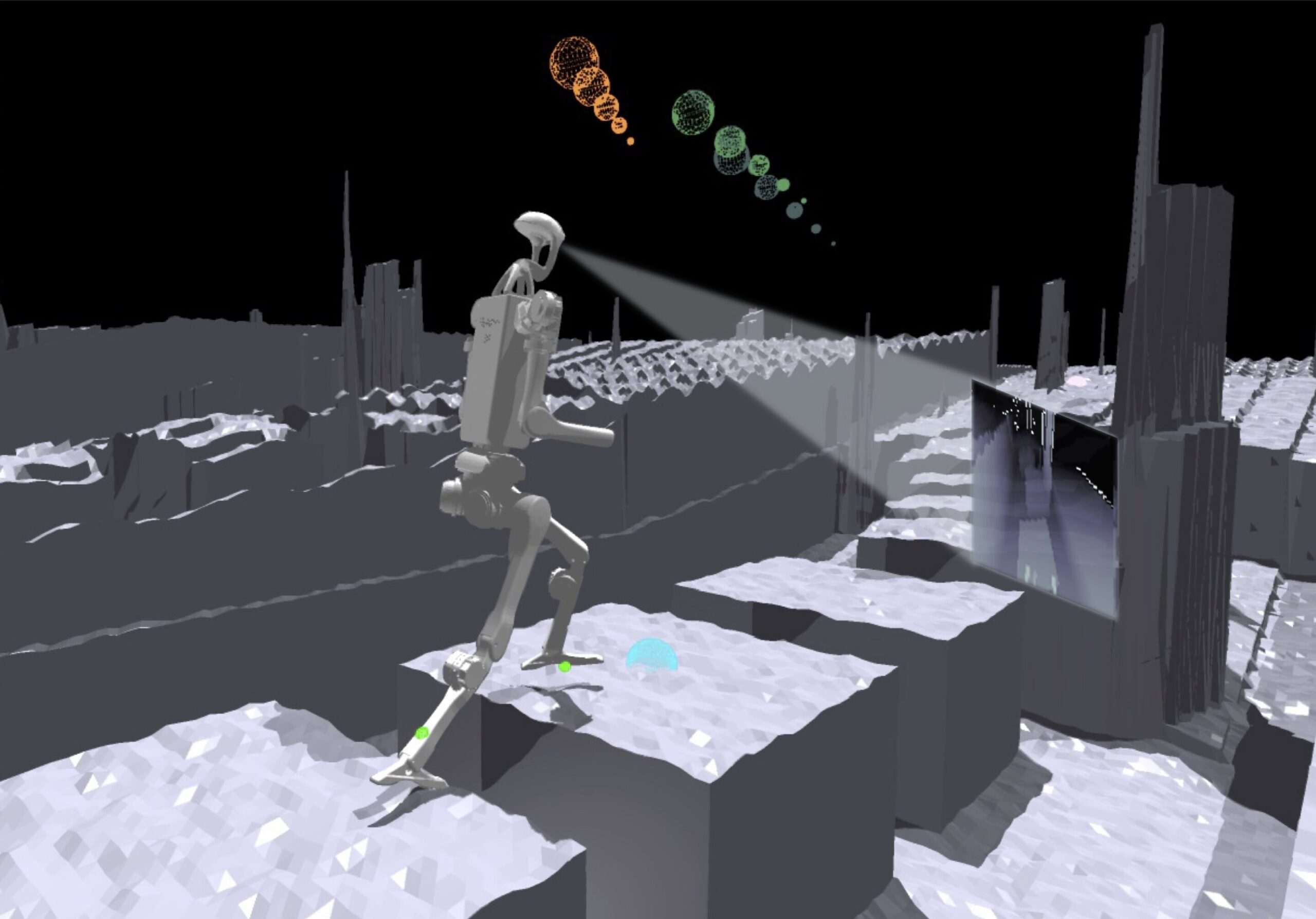
Avec leur nouveau cadre d'IA appelé LEGO-H, les chercheurs ont formé des humanoïdes simulés et équipés de caméras à planifier à l'avance, à éviter les obstacles, à maintenir la posture et à ajuster la vitesse et à fouler à un terrain inégal.
« Notre modèle est le premier qui pourrait donner à un robot humanoïde la capacité de voir, de décider et de se déplacer entièrement seuls – pas simplement marcher, mais sauter, marcher ou sauter au moment où le sentier l'exige. 2025.
L'œuvre est publiée sur le arxiv serveur de préimprimée.
Traditionnellement, les robots ont appris à naviguer sur des surfaces plates et dégagées en utilisant des cartes pré-construites et des conseils humains constants, avec une planification de haut niveau (« où aller ») et une exécution de bas niveau (« comment se déplacer ») traitées comme des problèmes distincts.
« L'unification de la navigation et de la locomotion dans un seul cadre d'apprentissage politique permet aux robots de développer leurs propres stratégies de mouvement basées sur la situation sans aucun modèle de préprogrammation humain », a déclaré Kwan-Yee Lin, chercheur en informatique et ingénierie et auteur principal de l'étude.
Dans la simulation, les robots humanoïdes sont abandonnés sur un sentier inconnu et ont demandé de naviguer vers un point spécifique. Ils sont équipés d'une entrée visuelle, d'une conscience corporelle et d'une simple direction GPS – comme « la destination est à 0,3 mile au nord-est » – plutôt que des directions tournantes.
Les robots virtuels de 6 pieds de 6 pieds et des robots d'enfants à environ 4 pieds ont fait une randonnée de trails de cinq types différents, chacun avec cinq niveaux de difficulté. Les performances ont été mesurées sur l'exhaustivité, la sécurité et l'efficacité.
Par rapport aux robots donnés à l'avance de navigation et environnementale parfaite, les performances des robots autonomes simulés étaient comparables ou mieux en efficacité et en sécurité. Leur conscience du corps intégré a contribué à prévenir les dommages et à éliminer cet aspect réduit sensiblement le succès de la randonnée, ont déclaré les chercheurs.
Les robots autonomes virtuels ont appris à adapter leur position corporelle et leur style de mouvement basé sur le terrain. Par exemple, lors de son arrivée dans un espace serré, les robots ont appris à se pencher sur le côté pour se faire passer. Ils ont également été en mesure de décider des chemins en fonction des obstacles – en parcourant de grands obstacles et en passant par-dessus les obstacles inférieurs, en faisant le tour s'ils n'étaient pas en mesure de passer.
« Étonnamment, les robots virtuels pourraient retrouver leur équilibre après un trébuchement – quelque chose que ce n'est pas vu dans les humanoïdes précédents. Nous n'avons pas programmé cela. Il est apparu naturellement alors que les robots ont appris à interagir avec leur environnement », a déclaré Lin.
Pour cette première étude, le haut du corps du robot a été maintenu fixe car l'ajout de mouvements du haut du corps augmente considérablement la complexité de la modélisation. Maintenant que cette étude de preuve de concept a fonctionné pour le mouvement des jambes, l'équipe de recherche travaille à la randonnée coordonnée du corps pour utiliser le degré complet du robot pour maximiser la stabilité, la sécurité et l'efficacité de la locomotion.
L'équipe de recherche travaille activement à l'adaptation de ces politiques aux humanoïdes physiques dans le monde réel.