
Le robot humanoïde de nouvelle génération peut faire le moonwalk
Le robot humanoïde développé par l'équipe de recherche kaist a des performances de conduite de classe mondiale, atteignant des vitesses de 12 km / h, ainsi qu'une excellente stabilité, en maintenant l'équilibre même avec les yeux fermés ou sur un terrain accidenté. En outre, il peut effectuer des mouvements complexes spécifiques à l'homme tels que le Duckwalk et Moonwalk, attirant l'attention comme une plate-forme de robot de nouvelle génération qui peut être utilisée dans des paramètres industriels réels.
L'équipe de recherche du professeur Park Hae-Won au Humanoid Robot Research Center (Hubolab) du département de génie mécanique de Kaist a développé la plate-forme du bas du corps pour un robot humanoïde de nouvelle génération. L'humanoïde développé est caractérisé par sa conception adaptée aux environnements centrés sur l'homme, ciblant une hauteur (165 cm) et un poids (75 kg) similaires à celui d'un humain.
L'importance de la nouvelle plate-forme inférieure du corps est immense car l'équipe de recherche a conçu directement et a fabriqué tous les composants principaux, y compris les moteurs, les réducteurs et les moteurs. En sécurisant des composants clés qui déterminent les performances des robots humanoïdes avec leur propre technologie, ils ont atteint l'indépendance technologique en termes de matériel.
En outre, l'équipe de recherche a formé un contrôleur d'IA à travers un algorithme d'apprentissage de renforcement auto-développé dans un environnement virtuel, l'a appliqué avec succès à des environnements réels en surmontant l'écart Sim à réel, garantissant ainsi l'indépendance technologique en termes d'algorithmes.
Actuellement, l'humanoïde développé peut fonctionner à une vitesse maximale de 3,25 m / s (environ 12 km / h) sur un terrain plat et a une capacité d'escalade de plus de 30 cm (un indicateur de performance montrant à quel point un trottoir, des escaliers ou un obstacle peuvent être surmontés). L'équipe prévoit d'améliorer encore ses performances, visant une vitesse de conduite de 4,0 m / s (environ 14 km / h), l'escalade d'échelle et plus de 40 cm d'escalade.
L'équipe du professeur Hae-Won Park collabore avec l'équipe (armes) du professeur Jae-Min Hwangbo du département de génie mécanique de Kaist, l'équipe du professeur Sangbae Kim (Hands) du MIT, l'équipe du professeur Hyun Myung (localisation et navigation) du département de génie électrique de Kaist) de l'équipe de la manipulation de Kim Jaechul de Jaechul de Jaechoul) Graduate School pour mettre en œuvre un matériel humanoïde complet avec un haut du corps et une IA.
Grâce à cela, ils développent une technologie pour permettre au robot d'effectuer des tâches complexes telles que le transport d'objets lourds, les vannes d'exploitation, les manivelles et les poignées de porte, et de marcher et de manipuler simultanément lors de la poussée des chariots ou des échelles d'escalade. L'objectif ultime est de garantir des capacités physiques polyvalentes pour répondre aux exigences complexes des sites industriels réels.
")
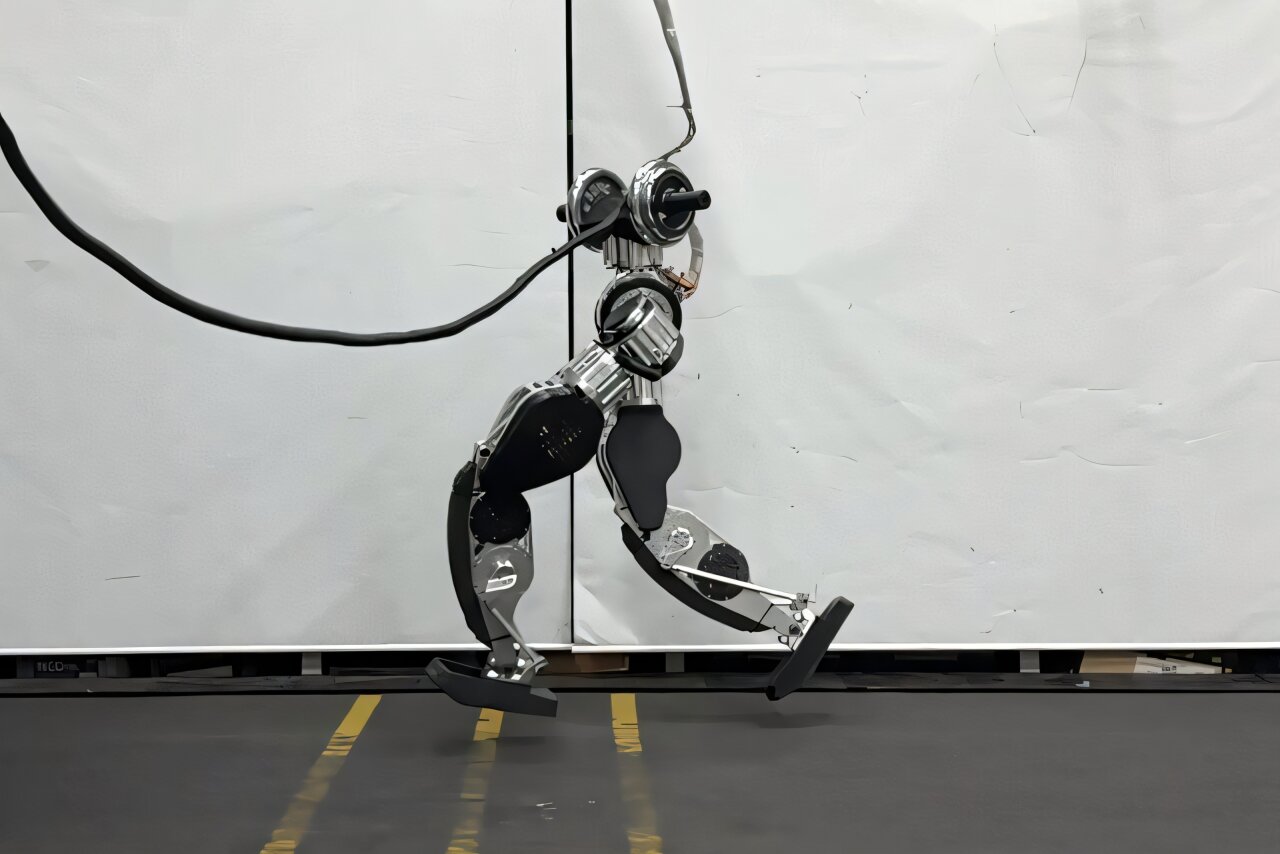
Au cours de ce processus, l'équipe de recherche a également développé un robot de « saut » à lames. Ce robot a démontré des mouvements de haut niveau, en maintenant l'équilibre sur une jambe et un saut à plusieurs reprises, et a même montré des capacités sportives extrêmes telles qu'un somersault à 360 degrés.
Surtout dans une situation où l'apprentissage de l'imitation était impossible en raison de l'absence d'un modèle de référence biologique, l'équipe de recherche a obtenu des résultats significatifs en mettant en œuvre un contrôleur d'IA par l'apprentissage du renforcement qui optimise le centre de la vitesse de masse tout en réduisant l'impact du débarquement.
Le professeur Park Hae-won a déclaré: «Cette réalisation est une étape importante qui a atteint l'indépendance dans les aspects matériels et logiciels de la recherche humanoïde en sécurisant les composants principaux et les contrôleurs d'IA avec notre propre technologie.
« Nous allons en outre le développer en un humanoïde complet, y compris un haut du corps pour résoudre les exigences complexes des sites industriels réels et en outre le favoriser en tant que robot de nouvelle génération qui peut fonctionner aux côtés des humains. »
 réducteur, (b) stator moteur, (c) conducteur de moteur, (d) Carte de converti Ethercat-can. Crédit: le Korea Advanced Institute of Science and Technology (Kaist)")
Les résultats de cette recherche seront présentés par Jonghun Choe, un doctorat. Candidat en génie mécanique, en tant que premier auteur, sur le développement matériel chez Humanoids 2025, une conférence internationale spécialisée de robot humanoïde qui s'est tenue le 1er octobre.
De plus, Ph.D. Les candidats Dongyun Kang, Gijeong Kim et Jonghun Choe de l'ingénierie mécanique présenteront les réalisations de l'algorithme de l'IA en tant qu'auteurs co-primitifs à Corl 2025, la meilleure conférence de Robot Intelligence, qui s'est tenue le 29 septembre.
Les documents de présentation sont disponibles sur le arxiv serveur de préimprimée.