
Le premier environnement de conduite simulé réaliste au monde basé sur une intersection du Michigan « sujette aux accidents »
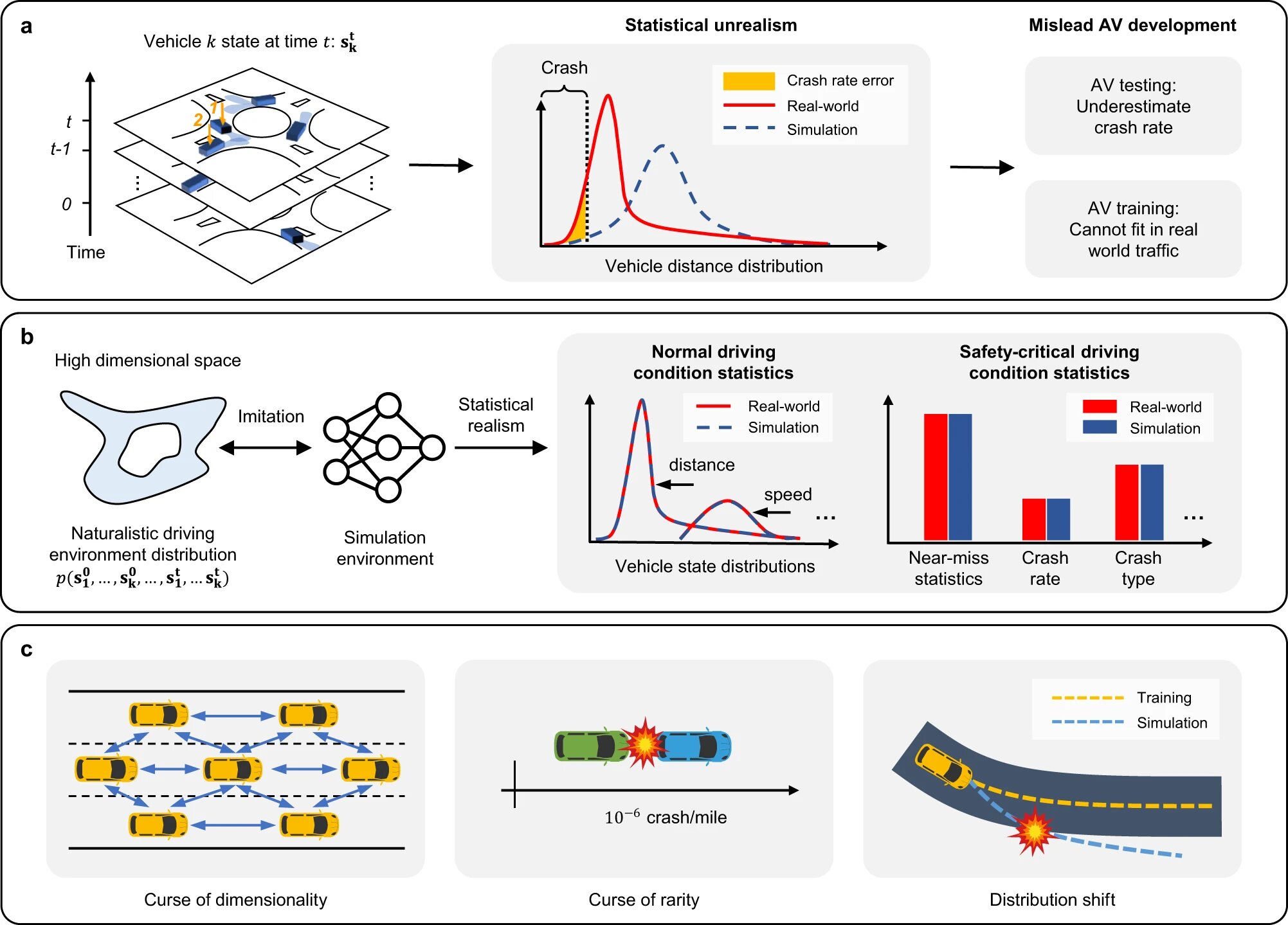
Modélisation d’un environnement de conduite naturaliste avec un réalisme statistique. un Des erreurs statistiques dans la simulation peuvent induire en erreur le développement du VA. b La distribution sous-jacente de l’environnement de conduite naturaliste est très complexe et dans un espace de grande dimension car elle implique de multiples agents et des horizons de temps longs. L’environnement de simulation doit atteindre un réalisme statistique, c’est-à-dire des statistiques précises au niveau de la distribution concernant les comportements de conduite humaine dans des conditions de conduite normales et critiques pour la sécurité. c Défis majeurs pour la modélisation des comportements d’interaction multi-agents et la construction d’environnements de conduite naturalistes. Les défis incluent la « malédiction de la dimensionnalité » pour les comportements multi-agents hautement interactifs, la « malédiction de la rareté » des événements critiques pour la sécurité dans le monde réel et le « changement de distribution » pour les simulations à long terme. Crédit: Communication Nature (2023). DOI : 10.1038/s41467-023-37677-5
La première simulation routière statistiquement réaliste a été développée par des chercheurs de l’Université du Michigan. S’il représente pour l’instant un carrefour particulièrement périlleux, des travaux futurs l’élargiront à d’autres situations de conduite pour tester des logiciels de véhicules autonomes.
La simulation est un modèle d’apprentissage automatique qui s’est entraîné sur les données collectées à un rond-point du côté sud d’Ann Arbor, reconnu comme l’une des intersections les plus sujettes aux accidents dans l’État du Michigan et idéalement situé à quelques kilomètres des bureaux du l’équipe de recherche.
Connu sous le nom de Neural Naturalistic Driving Environment ou NeuralNDE, il a transformé ces données en une simulation de ce que les conducteurs vivent au quotidien. Des routes virtuelles comme celle-ci sont nécessaires pour assurer la sécurité des logiciels de véhicules autonomes avant que d’autres voitures, cyclistes et piétons ne croisent son chemin.
« Le NeuralNDE reproduit l’environnement de conduite et, plus important encore, simule de manière réaliste ces situations critiques pour la sécurité afin que nous puissions évaluer les performances de sécurité des véhicules autonomes », a déclaré Henry Liu, professeur de génie civil à l’UM et directeur de Mcity, un public dirigé par l’UM. -partenariat de recherche sur la mobilité privée.
Liu est également directeur du Center for Connected and Automated Transportation et auteur correspondant de l’étude en Communication Nature. La publication a été présentée comme point culminant de l’éditeur.
Les événements critiques pour la sécurité, qui obligent un conducteur à prendre des décisions en une fraction de seconde et à agir, ne se produisent pas si souvent. Les conducteurs peuvent passer de nombreuses heures entre les événements qui les obligent à serrer les freins ou à faire une embardée pour éviter une collision, et chaque événement a ses propres circonstances.
Ensemble, ceux-ci représentent deux goulots d’étranglement dans l’effort de simulation de nos routes, connus respectivement sous le nom de « malédiction de la rareté » et de « malédiction de la dimensionnalité ». La malédiction de la dimensionnalité est causée par la complexité de l’environnement de conduite, qui comprend des facteurs tels que la qualité de la chaussée, les conditions météorologiques actuelles et les différents types d’usagers de la route, y compris les piétons et les cyclistes.
Pour tout modéliser, l’équipe a essayé de tout voir. Ils ont installé des systèmes de capteurs sur des lampadaires qui collectent en continu des données au rond-point de State Street/Ellsworth Road.
« La raison pour laquelle nous avons choisi cet emplacement est que les ronds-points sont un scénario de conduite urbaine très difficile pour les véhicules autonomes. Dans un rond-point, les conducteurs sont tenus de négocier et de coopérer spontanément avec les autres conducteurs qui traversent l’intersection. De plus, ce rond-point particulier fait l’expérience volume de trafic élevé et à deux voies, ce qui ajoute à sa complexité », a déclaré Xintao Yan, titulaire d’un doctorat. étudiant en génie civil et environnemental et premier auteur de l’étude, qui est conseillé par Liu.
Le NeuralNDE est un élément clé du CCAT Safe AI Framework for Trustworthy Edge Scenario Tests, ou SAFE TEST, un système développé par l’équipe de Liu qui utilise l’intelligence artificielle pour réduire de 99,99 % les kilomètres de test nécessaires pour assurer la sécurité des véhicules autonomes.
Il brise essentiellement la « malédiction de la rareté », introduisant des incidents critiques pour la sécurité mille fois plus fréquemment qu’ils ne se produisent lors d’une conduite réelle. Le NeuralNDE est également essentiel à un projet conçu pour permettre à l’installation de test de Mcity d’être utilisée pour tester à distance des logiciels audiovisuels.
Mais contrairement à un environnement entièrement virtuel, ces tests se déroulent en réalité mixte sur des pistes d’essai fermées telles que le Mcity Test Facility et l’American Center for Mobility à Ypsilanti, Michigan. En plus des conditions réelles de la piste, les véhicules autonomes font également l’expérience de conducteurs, cyclistes et piétons virtuels se comportant à la fois de manière sûre et dangereuse. En testant ces scénarios dans un environnement contrôlé, les développeurs audiovisuels peuvent affiner leurs systèmes pour mieux gérer toutes les situations de conduite.
Le NeuralNDE n’est pas seulement bénéfique pour les développeurs audiovisuels, mais également pour les chercheurs qui étudient le comportement du conducteur humain. La simulation peut interpréter les données sur la façon dont les conducteurs réagissent à différents scénarios, ce qui peut aider à développer une infrastructure routière plus fonctionnelle.