
La main robotique biomimétique intègre de manière transparente la rétroaction tactile pour surpasser les prédécesseurs
Au cours des dernières décennies, les robotiques ont développé des systèmes de plus en plus avancés qui peuvent imiter certaines capacités humaines et s'attaquer efficacement à diverses tâches du monde réel. Pour saisir de manière fiable, manipuler et utiliser des objets dans leur environnement, les robots devraient être en mesure de détecter et de traiter des informations tactiles, reproduisant les processus qui sous-tendent le sens du toucher humain.
Des chercheurs de l'Université de Pékin, de l'Institut de Pékin pour l'intelligence artificielle générale et de l'Université Queen Mary de Londres ont récemment développé F-Tac Hand, une main robotique biomimétique conçue pour imiter la perception tactile humaine. Cette main, introduite dans un article publié dans Intelligence de la machine de la natures'est avéré surpasser diverses tâches robotiques existantes sur la manipulation tactile, en collectant des informations tactiles détaillées qui peuvent être utilisées pour planifier les mouvements et les trajectoires de la main.
« Cette recherche a été motivée par le but de permettre aux machines de manipuler des objets avec précision et adaptabilité semblable aux capacités humaines », a déclaré à Tech Xplore Yixin Zhu, l'auteur correspondant du journal. « Notre inspiration pour résoudre ce problème provenait des capacités de détection tactile complexes observées dans la main humaine et du traitement neuronal spécialisé dans le cortex somatosensoriel primaire, qui interprète et intègre efficacement de grandes quantités d'entrée sensorielle en temps réel. »
L'objectif principal de cette étude récente de Zhu et de ses collègues était de développer une nouvelle main robotique qui peut intégrer de manière transparente la rétroaction tactile collectée à travers sa surface avec des mécanismes sensoriels-moteurs. Comme la plupart des mains robotiques existantes ne le font pas, une telle main pourrait mieux fonctionner sur diverses tâches de manipulation du monde réel.
. Doi: 10.1038 / s42256-025-01053-3")
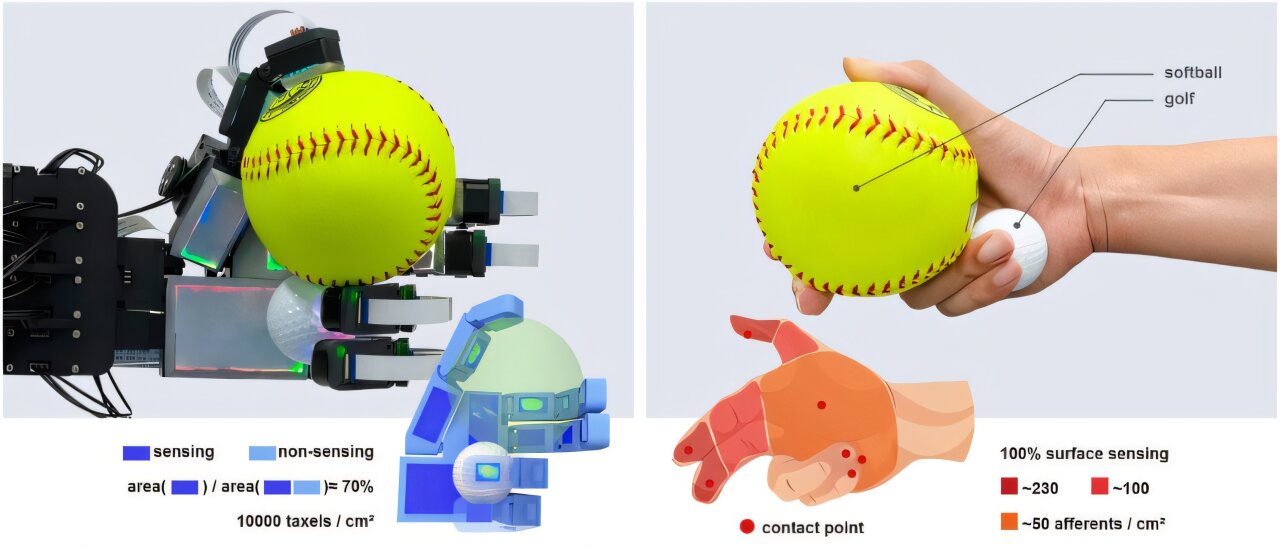
« La main F-TAC reproduit la structure biologique de la main humaine en intégrant 17 capteurs tactiles à haute résolution à travers 70% de la surface du palmier, atteignant une résolution spatiale impressionnante de 0,1 millimètre – équivalent à 10 000 pixels tactiles par centimètre carré », a expliqué Zhu.
« Un algorithme probabiliste permet la génération de stratégies de saisie diverses et de type humain couvrant 19 types de saisie communs.
L'avantage le plus notable de la main biométique développée par cette équipe de recherche est qu'elle peut ramasser des données tactiles sur toute sa surface, en utilisant ces données pour planifier ses propres mouvements. Pour évaluer ses performances, Zhu et ses collègues ont réalisé des expériences approfondies, au cours desquelles la main F-TAC a terminé un large éventail de tâches manuelles dans les scénarios du monde réel.

« Dans 600 expériences du monde réel, la main F-TAC a démontré une amélioration significative des taux de réussite de la saisie multi-objets, passant de 53,5% à 100% par rapport aux systèmes dépourvus de rétroaction tactile », a déclaré Zhu. « Les applications pratiques potentielles comprennent une assistance chirurgicale, un assemblage de haute précision, des opérations aérospatiales et des scénarios d'intervention d'urgence qui exigent une précision opérationnelle exceptionnelle. »
Les résultats initiaux des chercheurs mettent en évidence les avantages de la nouvelle main qu'ils ont développée, ce qui pourrait aider à stimuler les capacités sensorielles et moteurs des robots. À l'avenir, la main pourrait être améliorée davantage, intégrée à différents robots humanoïdes et testés dans d'autres expériences pour évaluer son potentiel d'applications spécifiques.
« Nous prévoyons maintenant de continuer à approfondir l'intégration de la détection tactile et du contrôle robotique, explorant des paradigmes d'interaction somatosensorielle plus intelligents », a ajouté Zhu. « Nous visons à faire progresser l'intelligence incarnée en combinant la détection physique de haute fidélité avec des systèmes de contrôle intelligents, contribuant au développement d'une intelligence artificielle vraiment générale. »
Écrit pour vous par notre auteur Ingrid Fadelli, édité par Sadie Harley, et vérifié et révisé par Robert Egan – cet article est le résultat d'un travail humain minutieux. Nous comptons sur des lecteurs comme vous pour garder le journalisme scientifique indépendant en vie. Si ce rapport vous importe, veuillez considérer un don (surtout mensuel). Vous obtiendrez un sans publicité compte comme un remerciement.