
La fusion de l'IA et de la robotique pour les environnements dynamiques
L'avancement de l'intelligence artificielle (IA) a inauguré une nouvelle ère de robotique automatisée adaptative à leur environnement.
Le domaine de la robotique a fait des progrès remarquables au cours des dernières décennies, mais elle continue de faire face à des défis qui entravent la pleine utilisation de son potentiel. Les robots traditionnels reposent souvent sur des instructions préprogrammées et des configurations restreintes, limitant leur capacité à répondre à des circonstances imprévues. Les technologies de l'IA – engageant la cognition, l'analyse, l'inférence et la prise de décision – des robots consacrés à fonctionner intelligemment, améliorant considérablement leurs capacités pour aider et soutenir les humains.
En augmentant les robots avec des technologies d'IA dans les systèmes d'ingénierie, nous pouvons nous attendre à des applications plus présentant en industrie, à l'agriculture, à la logistique, à la médecine et au-delà, permettant aux robots d'effectuer des tâches complexes avec une plus grande autonomie et efficacité. Cette amélioration technologique déclenche le potentiel de la robotique dans les applications du monde réel, offrant des solutions à des problèmes médicaux et environnementaux pressants et facilitant une évolution de paradigme vers la fabrication intelligente dans le contexte de la révolution de l'industrie 4.0.
Avec l'application de l'IA, une équipe de recherche dirigée par le professeur Dan Zhang, professeur président de robotique et d'automatisation intelligente au Département de génie mécanique, et directeur de l'Institut de recherche en technologie de la technologie et de l'innovation de Polyu-Nanjing à la Hong Kong Polytechnic University (POLYU), a fabriqué un certain nombre de nouveaux systèmes robotiques avec des performances dynamiques élevées.
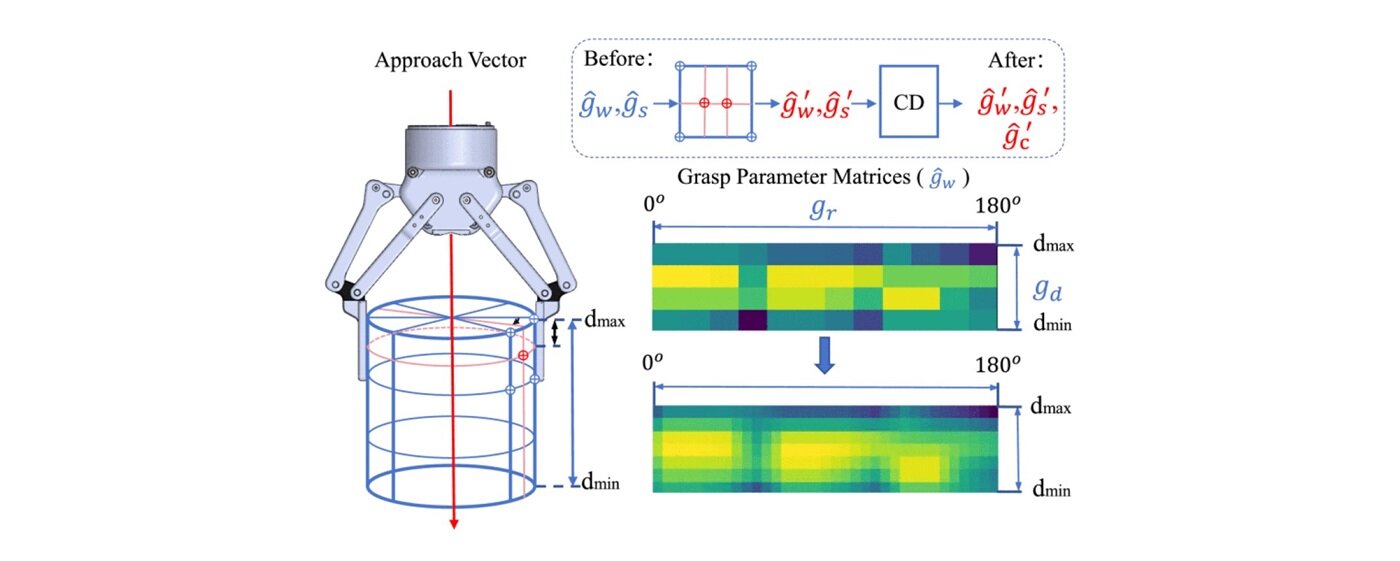
L'équipe de recherche du professeur Zhang a récemment proposé un cadre de détection de pose de saisie qui applique des réseaux de neurones profonds pour générer un riche ensemble de poses de saisie omnidirectionnelles (en six degrés de liberté « 6-DOF ») avec une haute précision. Pour détecter les objets à saisir, les réseaux de neurones convolutionnels (CNN) sont appliqués à un cylindre à plusieurs échelles avec des rayons variables, fournissant des informations géométriques détaillées sur l'emplacement et l'estimation de la taille de chaque objet.
Plusieurs perceptrons multicouches (MLP) optimisent les paramètres de précision du manipulateur robotique pour saisir des objets, y compris la largeur de la pinceau, le score de saisie (pour des angles de rotation dans le plan spécifiques et des profondeurs de pincement) ainsi que la détection de collision. Ces paramètres sont introduits dans un algorithme dans le cadre, étendant les saisies des configurations prédéfinies pour générer des poses de saisie complètes adaptées à la scène.
Les expériences révèlent que la méthode proposée surpasse systématiquement la méthode de référence dans les simulations de laboratoire, atteignant un taux de réussite moyen de 84,46% contre 78,31% pour la méthode de référence dans les expériences du monde réel.
De plus, l'équipe de recherche tire parti des technologies de l'IA pour améliorer la fonctionnalité et l'expérience utilisateur d'un nouvel exosquelette robotique pour la réhabilitation de la marche des patients atteints de troubles articulaires du genou. La structure de l'exosquelette comprend un actionneur propulsé par un moteur électrique pour aider activement à la flexion / extension du genou, une articulation de la cheville qui transfère le poids de l'exosquelette au sol et un mécanisme de réglage de la rigidité propulsé par un autre moteur électrique.
Un réseau à long terme à court terme (LSTM) dans un algorithme d'apprentissage automatique est appliqué pour fournir une rigidité non linéaire en temps réel et des ajustements de couple, imitant les caractéristiques biomécaniques de l'articulation du genou humain. Le réseau est formé sur un grand ensemble de données de signaux d'électromyographie (EMG) et de données de mouvement conjoint au genou, permettant des ajustements en temps réel de la rigidité et du couple de l'exosquelette basés sur les signaux physiologiques et les conditions de mouvement de l'utilisateur. En prédisant les ajustements nécessaires, le système s'adapte à diverses exigences de démarche, améliorant la stabilité et le confort de la marche de l'utilisateur.
L'intégration d'un algorithme de contrôle d'acceptation adaptatif basé sur des réseaux de fonctions de base radiale (RBF) permet à l'exosquelette robotique du genou d'ajuster automatiquement les angles articulaires et les paramètres de rigidité sans avoir besoin de capteurs de force ou de couple. Cela améliore la précision du contrôle de la position et améliore la réactivité de l'exosquelette aux différentes postures de marche. Cette approche basée sur les données affine les prédictions du modèle et améliore les performances globales au fil du temps.
Les résultats expérimentaux démontrent que le modèle surpasse les méthodes de contrôle fixe traditionnelles en termes de précision et de réactivité en temps réel, générant la trajectoire articulaire de référence souhaitée pour les utilisateurs à différentes vitesses de marche.
La recherche du professeur Zhang et de son équipe révèle que les techniques de l'IA, en particulier l'apprentissage en profondeur, ont amélioré la capacité des robots à percevoir et à comprendre leur environnement. Cette avancement contribue à des solutions plus efficaces et flexibles pour gérer les tâches au-delà des configurations fixes dans des paramètres standard.
La fusion de l'IA et de la robotique améliore non seulement la précision et la précision, mais introduit également de nouvelles capacités d'automatisation robotique, permettant la prise de décision en temps réel et l'apprentissage continu. En conséquence, les robots peuvent améliorer leurs performances au fil du temps, conduisant à une utilisation étendue de la robotique dans la Société pour les efforts futurs.