
AI Model Masters Nouveau terrain à la NASA Facility One Scoop à la fois
Les atterrisseurs extraterrestres envoyés pour recueillir des échantillons de la surface des lunes lointaines et des planètes ont un temps limité et une puissance de batterie pour terminer leur mission. Des chercheurs en génie en aérospatiale et en informatique du Grainger College of Engineering de l’Université de l’Illinois Urbana-Champaign ont formé un modèle pour évaluer et se faufiler de manière autonome, puis la voir démontrer ses compétences sur un robot dans une installation de la NASA.
Ph.D. L’étudiant Pranay Thongeda a déclaré avoir formé leur bras d’atterrissage robotique pour collecter des données de récupération sur une variété de matériaux, du sable aux rochers, ce qui a entraîné une base de données de 6 700 points de connaissance. Les deux terrains dans le bilan d’essai d’autonomie de l’Ocean World Landder de la NASA au Jet Propulsion Laboratory étaient nouveaux dans le modèle qui exploitait le bras robotique JPL à distance.
L’étude, «Apprentissage et autonomie pour l’échantillonnage des terrains extraterrestres: un rapport d’expérience du déploiement d’Owlat», a été publié dans le Forum AIAA Scitech.
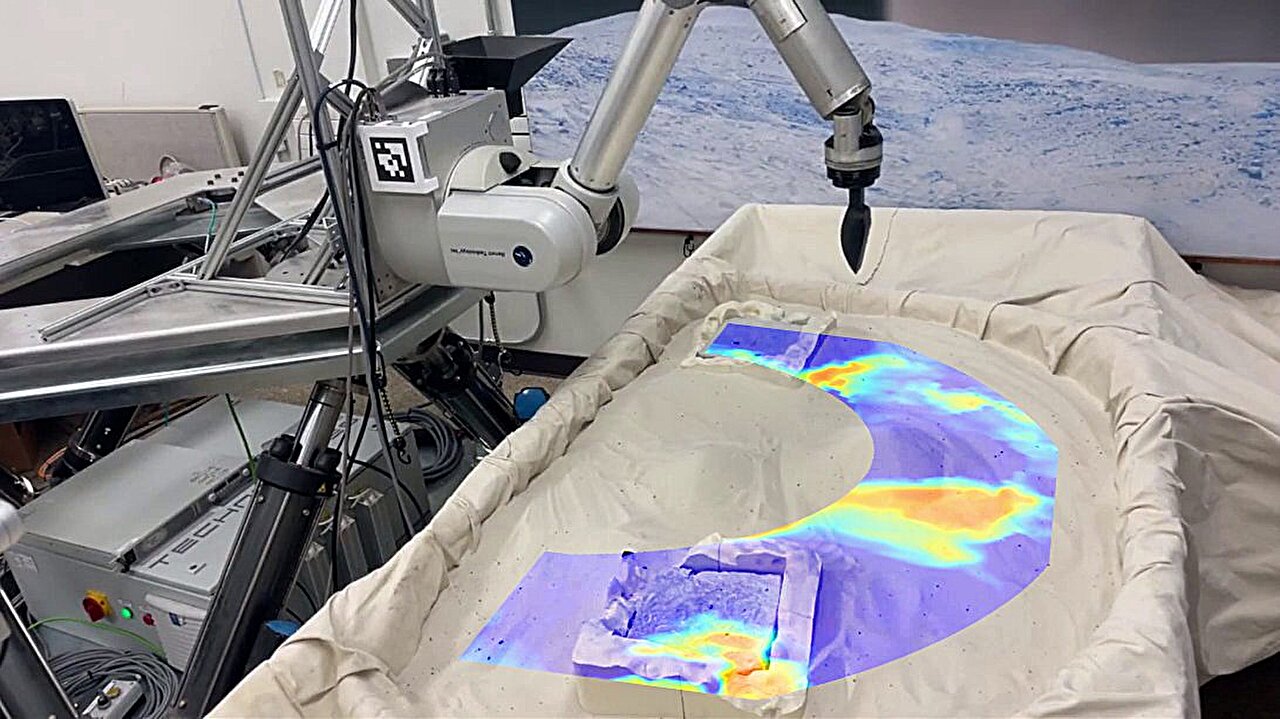
« Nous venons d’avoir un lien réseau sur Internet », a déclaré Thongeda. « Je me suis connecté au banc d’essai de JPL et j’ai obtenu une image de la caméra de leur bras robotique. Je l’ai parcourue mon modèle en temps réel. Le modèle a choisi de commencer avec le matériau en forme de roche et j’ai appris lors de son premier essai que c’était un Matériel insuffisant. «
Sur la base de ce qu’il a appris de l’image et de cette première tentative, le bras robotique s’est déplacé dans un autre domaine plus probable et a réussi à ramasser l’autre terrain, un matériau de grains plus fin. Étant donné que l’une des exigences de la mission est que le robot scoop un volume spécifique de matériel, l’équipe JPL a mesuré le volume de chaque scoop jusqu’à ce que le robot ait réalisé la quantité totale.
Thongeda a déclaré que bien que ce travail soit à l’origine motivé par l’exploration des mondes océaniques, leur modèle peut être utilisé sur n’importe quelle surface.
« Habituellement, lorsque vous formez des modèles en fonction des données, ils ne fonctionnent que sur la même distribution de données. La beauté de notre méthode est que nous n’avons rien à changer pour travailler sur le lit d’essai de la NASA parce que, dans notre méthode, nous nous adaptons en ligne.
« Même si nous n’avons jamais vu aucun des terrains au banc d’essai de la NASA, sans aucun réglage fin sur leurs données, nous avons réussi à déployer le modèle formé ici directement là-bas, et le déploiement du modèle s’est produit à distance – Exact Lorsqu’il est déployé sur une nouvelle surface dans l’espace. «
Le conseiller de Thangeda, Melkior Ornik, est la tête de l’un des quatre projets résolvant différents problèmes. Le seul point commun entre eux est qu’ils font tous partie du programme Europa et utilisent cet lander comme banc d’essai pour explorer différents problèmes.
« Nous avons été l’un des premiers à démontrer quelque chose de significatif sur leur plate-forme conçue pour imiter une surface d’Europa. C’était formidable de voir enfin quelque chose sur lequel vous avez travaillé pendant des mois sur une véritable plate-forme à haute fidélité. C’était cool de voir le Le modèle est testé sur un terrain complètement différent et un robot de plate-forme complètement différent sur lequel nous n’avions jamais formé.
Thongeda a déclaré que les commentaires qu’ils avaient reçus de l’équipe JPL étaient également bons. « Ils étaient heureux que nous ayons pu déployer le modèle sans beaucoup de changements. Il y avait des problèmes lorsque nous commencions, mais j’ai appris que c’était parce que nous étions les premiers à essayer de déployer un modèle sur leur plate-forme, donc Ce sont des problèmes de réseau et des bogues simples dans le logiciel qu’ils ont dû corriger.
« Une fois que nous l’avons fait fonctionner, les gens ont été surpris qu’il ait pu apprendre à l’intérieur d’un ou deux échantillons. Certains ne l’ont même pas cru jusqu’à ce qu’ils aient montré les résultats et la méthodologie exacts. »
Thongeda a déclaré que l’un des problèmes importants que lui et son équipe devaient surmonter était de mettre leur configuration sur la parité avec la configuration de la NASA.
« Notre modèle a été entraîné sur une caméra dans un endroit particulier avec une scoop de forme particulière. L’emplacement et la forme du scoop étaient deux choses que nous devions aborder. Pour nous assurer que leur robot avait exactement la même forme de scoop, nous leur avons envoyé un CAD Design et ils l’ont imprimé et l’ont attaché à leur robot.
« Pour la caméra, nous avons pris leurs informations RVB-D Point Cloud et l’avons reprochée en temps réel à un autre point de vue, de sorte qu’il correspondait à ce que nous avions dans notre robot avant de l’envoyer au modèle. De cette façon, ce que le modèle a vu le modèle était un point de vue similaire à ce qu’il a vu pendant la formation. «
Thongeda a déclaré qu’ils prévoyaient de s’appuyer sur cette recherche pour des fouilles plus autonomes et l’automatisation des travaux de construction comme creuser un canal. Il est beaucoup plus facile pour les humains de faire ces choses. Il est difficile pour un modèle d’apprendre à faire ces choses de manière autonome, car les interactions sont très nuancées.