
Le modèle de réseaux neuronaux améliore la vision machine et la détection d’objets dans des conditions de faible luminosité
Lors de la conception d’un robot, comme l’atlas de robot anthropomorphe de Boston Dynamics, qui apparaît des boîtes d’exercice et de tri, les marqueurs fiduciaux sont les guides qui les aident à se déplacer, à détecter les objets et à déterminer leur emplacement exact. Il s’agit d’un outil de vision machine qui est utilisé pour estimer les positions des objets. À première vue, ils sont des codes carrés noir et blancs à contraste plat et à contraste élevé, ressemblant à peu près au système de marquage QR, mais avec un avantage: ils peuvent être détectés à des distances bien plus grandes.
En termes de logistique, une caméra sur le toit permet d’identifier l’emplacement d’un package de manière automatisée en utilisant ces marqueurs, en économisant du temps et de l’argent. Jusqu’à présent, la faiblesse du système était des conditions d’éclairage, car les techniques classiques de vision industrielle qui localisent et décochent avec précision les marqueurs échouent dans des situations de faible luminosité.
Pour résoudre ce problème, les chercheurs Rafael Berral, Rafael Muñoz, Rafael Medina et Manuel J. Marín, avec le groupe de recherche sur les applications de vision machine à l’Université de Cordoue, ont développé un système capable, pour la première fois, de détecter et de décoder Marqueurs fiduciaux dans des conditions d’éclairage difficiles, en utilisant des réseaux de neurones. Le document est publié dans la revue Image et vision Computing.
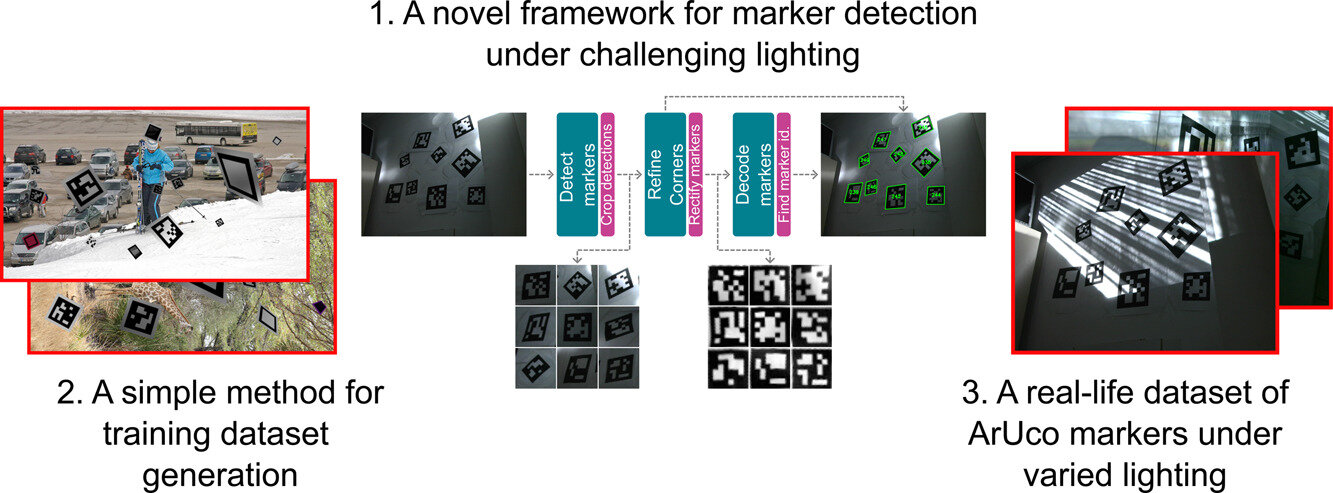
« L’utilisation de réseaux de neurones dans le modèle nous permet de détecter ce type de marqueur de manière plus flexible, résolvant le problème de l’éclairage pour toutes les phases du processus de détection et de décodage », a expliqué le chercheur Berral. L’ensemble du processus est composé de trois étapes: détection des marqueurs, raffinement de coin et décodage des marqueurs, chacun basé sur un réseau neuronal différent.
C’est la première fois qu’une solution complète est donnée à ce problème, car, comme le souligne Manuel J. Marín, « il y a eu de nombreuses tentatives de, dans des situations d’éclairage optimales, d’augmenter les vitesses, par exemple, mais le problème de Un faible éclairage, ou plusieurs ombres, n’avait pas été complètement abordé pour améliorer le processus. «
Comment former votre modèle de vision machine
Lors de la formation de ce modèle, qui présente une solution de bout en bout, l’équipe a créé un ensemble de données synthétique qui reflète de manière fiable le type de circonstances d’éclairage qui peuvent être rencontrées lorsque vous travaillez avec un système de marqueur sans conditions idéales. Une fois formé, « le modèle a été testé avec des données du monde réel, certains ont produit ici en interne et d’autres comme références d’autres œuvres précédentes », indiquent les chercheurs.
Les données générées artificiellement pour former le modèle, et celles des situations d’éclairage défavorables dans le monde réel, sont disponibles sur une base ouverte. Ainsi, le système pourrait être appliqué aujourd’hui « depuis la libération du code et il a été rendu possible de tester le code avec n’importe quelle image dans laquelle les marqueurs fiduciaux apparaissent », rappelle Rafael Muñoz.
Grâce à ce travail, les applications de vision machine ont surmonté un nouvel obstacle: se déplacer dans l’obscurité.