
Un nouveau cadre de prévision des mouvements peut produire des voitures autonomes plus sûres et plus intelligentes
Alors que les voitures autonomes devraient arriver sur les routes britanniques l’année prochaine (2026), un nouveau cadre de prévision des mouvements développé par l’Université de Surrey et l’Université de Fudan, en Chine, promet de rendre les voitures autonomes à la fois plus sûres et plus intelligentes.
Les chercheurs ont combiné leur expertise pour créer RealMotion, un nouveau système de formation qui intègre de manière transparente des données de scène historiques et en temps réel avec des informations contextuelles et temporelles, ouvrant la voie à une technologie de véhicule autonome plus efficace et plus fiable. La recherche est publiée sur le arXiv serveur de préimpression.
Le Dr Xiatian Zhu, maître de conférences au Centre de traitement de la vision, de la parole et du signal et à l’Institut pour l’IA centrée sur les personnes de l’Université de Surrey et co-auteur de l’étude, a déclaré : « Les voitures sans conducteur ne sont plus un rêve futuriste. Les robotaxis fonctionnent déjà dans certaines régions des États-Unis et de la Chine, et des véhicules autonomes devraient circuler sur les routes du Royaume-Uni dès l’année prochaine. Cependant, la vraie question qui préoccupe tout le monde est la suivante : dans quelle mesure sont-ils sûrs ?
« Bien que l’IA fonctionne différemment des pilotes humains, il reste encore des défis à relever. C’est pourquoi nous avons développé RealMotion, pour doter l’algorithme non seulement de données en temps réel, mais également de la capacité d’intégrer un contexte historique dans l’espace et dans le temps, permettant ainsi des résultats plus précis et plus précis. prise de décision fiable pour une navigation autonome plus sûre.
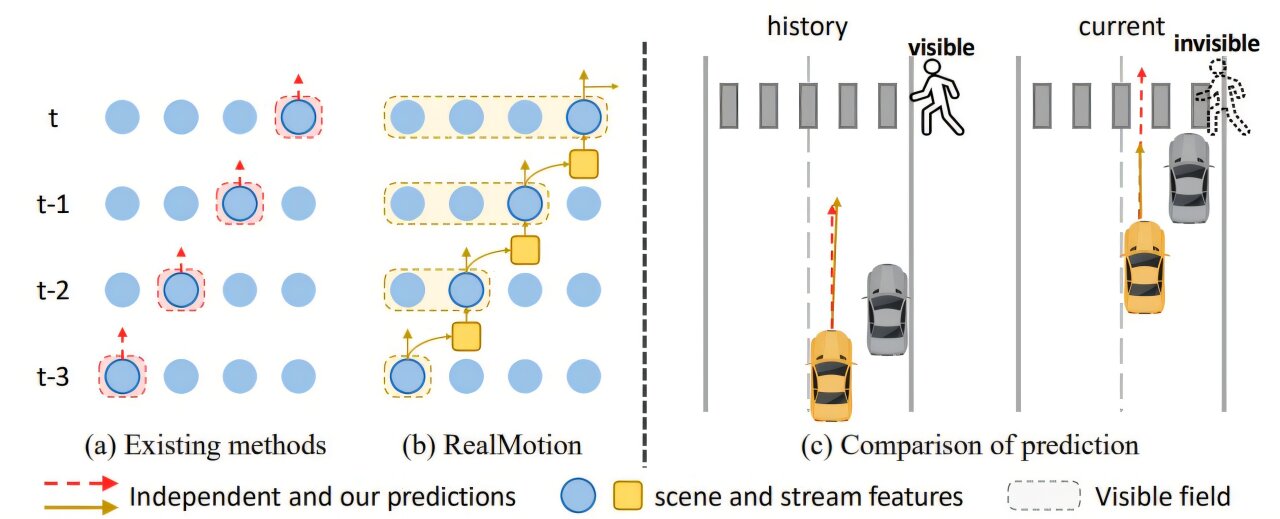
Les méthodes de prévision de mouvement existantes traitent généralement chaque scène de conduite indépendamment, négligeant la nature interconnectée des contextes passés et présents dans les scénarios de conduite continue. Cette limitation entrave la capacité de prédire avec précision les comportements des véhicules, piétons et autres agents environnants dans des environnements en constante évolution.
En revanche, RealMotion crée une compréhension plus claire des différentes scènes de conduite. L’intégration des données passées et présentes améliore la prévision des mouvements futurs, en répondant à la complexité inhérente à la prévision des mouvements de plusieurs agents.
Des expériences approfondies menées à l’aide de l’ensemble de données Argoverse, une référence majeure en matière de recherche sur la conduite autonome, mettent en évidence la précision et les performances de RealMotion. Par rapport à d’autres modèles d’IA, le cadre a permis d’obtenir une amélioration de 8,60 % de l’erreur de déplacement final (FDE), qui correspond à la distance entre la destination finale prévue et la véritable destination finale. Il a également démontré des réductions significatives de la latence de calcul, ce qui le rend parfaitement adapté aux applications en temps réel.
Le professeur Adrian Hilton, directeur du Surrey Institute for People-Centered AI, a déclaré : « Avec l’arrivée imminente de voitures autonomes sur les routes britanniques, assurer la sécurité des personnes est primordial. Le développement de RealMotion par le Dr Zhu et son équipe offre une avancée significative en matière d’intelligence artificielle. méthodes existantes.
« En équipant les véhicules autonomes pour qu’ils perçoivent leur environnement en temps réel et en tirant également parti du contexte historique pour prendre des décisions éclairées, RealMotion ouvre la voie à une navigation plus sûre et plus intelligente sur nos routes. »
Même si les chercheurs ont rencontré certaines limites, l’équipe prévoit de poursuivre ses recherches pour améliorer encore les capacités de RealMotion et surmonter tous les défis. Ce cadre a le potentiel de jouer un rôle essentiel dans l’élaboration de la prochaine génération de véhicules autonomes, en garantissant des systèmes de navigation plus sûrs et plus intelligents pour l’avenir.