
Les chercheurs développent une nouvelle méthode pour suivre la trajectoire des navires autonomes
La popularité croissante des véhicules autonomes a suscité un intérêt important en matière de recherche dans l’industrie maritime, en particulier pour le développement de navires de surface maritimes autonomes (MASS). Une exigence essentielle du MASS est la capacité de suivre une trajectoire maritime prédéterminée, en tenant compte des obstacles, de la profondeur de l’eau et de la manœuvrabilité du navire.
Tout écart de cette trajectoire en raison de conditions météorologiques défavorables présente de graves risques tels que des incidents de collision, de contact ou d’échouement. Il est donc souhaitable que les navires autonomes disposent d’un mécanisme permettant de résister efficacement aux déviations.
Cependant, les méthodes actuelles d’évaluation des performances de suivi de trajectoire des navires autonomes reposent sur des modèles mathématiques simplifiés de navires. Malheureusement, ces modèles ne peuvent pas capturer les interactions complexes entre la coque, l’hélice, le gouvernail et les charges externes des navires, ce qui conduit à des estimations inexactes des performances de suivi de trajectoire.
De plus, en réponse à l’indice de conception d’efficacité énergétique de l’Organisation maritime internationale visant à réduire les émissions de gaz à effet de serre, le Comité de protection du milieu marin a fourni des lignes directrices pour déterminer la puissance de propulsion minimale requise pour maintenir la manœuvrabilité du navire dans des conditions météorologiques défavorables.
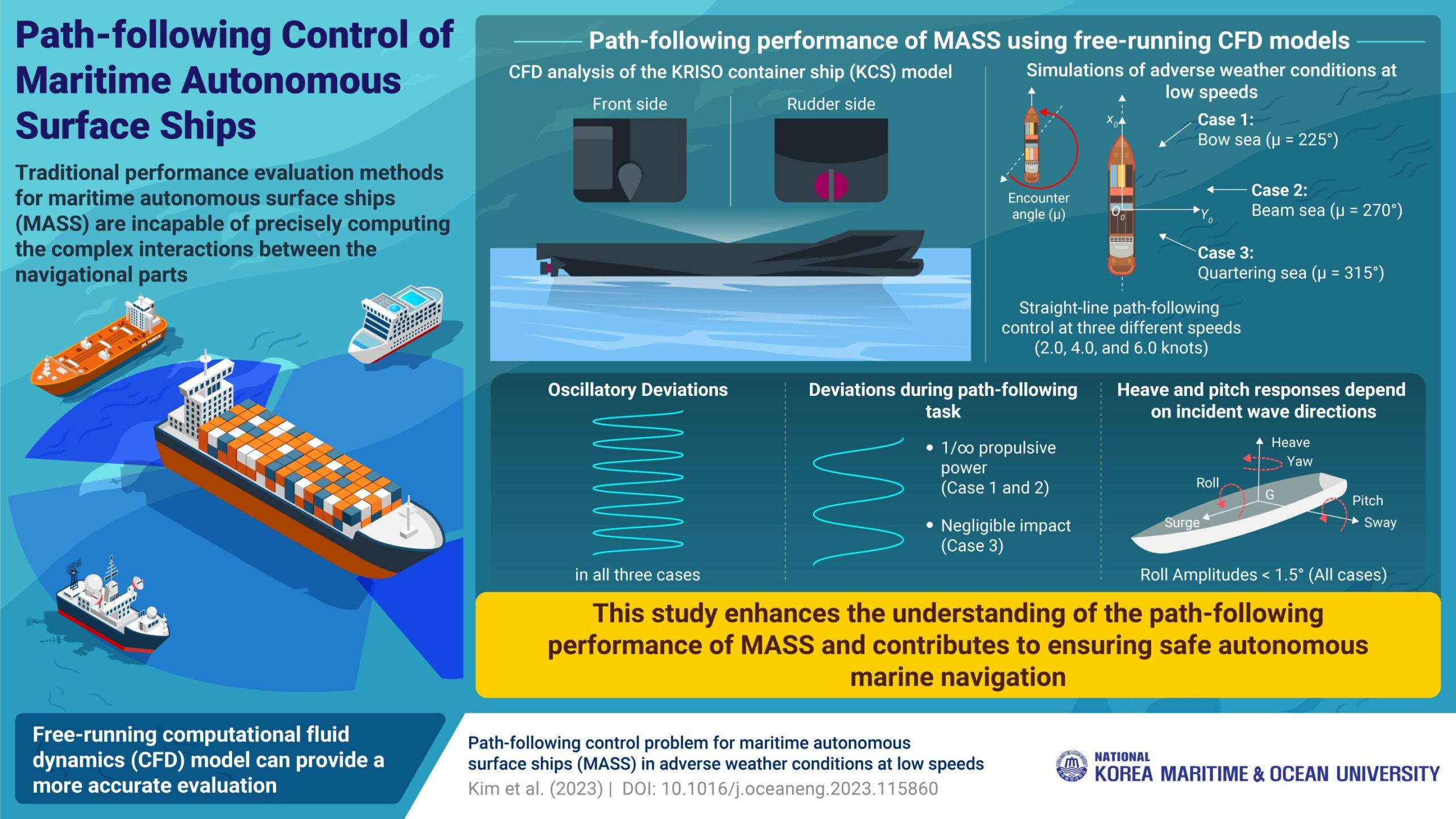
À la lumière de ces lignes directrices et de la nécessité d’évaluer les performances de suivi de chemin, une équipe multinationale de chercheurs, dirigée par le professeur adjoint Daejeong Kim de la Division des études sur la convergence de la navigation à l’Université nationale maritime et océanique de Corée, a récemment étudié le suivi de chemin. performances de MASS à l’aide d’un modèle numérique de dynamique des fluides (CFD) en fonctionnement libre combiné au système de guidage en ligne de visée (LOS), à basse vitesse dans des conditions météorologiques défavorables.
« Nous avons utilisé un modèle CFD basé sur un solveur Reynolds-Averaged Navier-Stokes instationnaire entièrement non linéaire qui peut intégrer des effets visqueux et turbulents et la résolution de surface libre essentielle aux problèmes de suivi de chemin, permettant une meilleure prédiction des performances de suivi de chemin », explique Dr Kim.
Leurs conclusions ont été publiées dans Génie océanique.
L’équipe a utilisé l’analyse basée sur CFD du modèle populaire de porte-conteneurs KRISO avec le système de guidage autonome LOS. Les conditions météorologiques défavorables ont été modélisées comme des perturbations dues aux vagues de proue, de travers et de quart, et ces trois cas ont été étudiés à trois vitesses différentes pour identifier l’effet des vitesses d’avancement sur les performances de suivi de trajectoire.
Les simulations ont révélé que le navire avait subi des déviations oscillatoires dans les trois cas. Dans le cas des ondes d’étrave et de faisceau, ces écarts diminuaient avec l’augmentation de la puissance de propulsion. Il est intéressant de noter que dans le cas des vagues écartées, la puissance de propulsion a eu un effet négligeable sur les déviations.
De plus, les réponses au soulèvement et au tangage du navire étaient fortement influencées par la direction des vagues incidentes. De plus, dans les trois cas, les amplitudes de roulis étaient constamment inférieures à 1,5 degrés. Cependant, l’équipe n’a pas pu déterminer l’efficacité de l’augmentation de la vitesse pour améliorer les performances de suivi de chemin.
Élaborant sur les implications de ces résultats, le Dr Kim déclare : « Le modèle proposé basé sur les CFD peut apporter une contribution précieuse à l’amélioration de la sécurité de la navigation maritime autonome. mener des expériences ou des essais en mer à grande échelle.
En résumé, cette étude établit une base pour analyser les performances de suivi de trajectoire du MASS à basse vitesse dans des conditions météorologiques défavorables et pourrait contribuer à garantir une navigation maritime autonome plus sûre.
Fourni par l’Université nationale maritime et océanique de Corée